
【導讀】基于MEMS姿態傳感器主要用于載體姿態的調整和傾角的檢測,但是由于工作環境溫度的改變,就會導致測量精度的變化,在一些高精度檢測的要求下,則失去其檢測的效果,所以必須采取相應措施來消除或者減少隨溫度變化而引起的誤差,即必須對傳感器進行溫度補償。
隨著微機電系統(MEMS)技術在微型化技術基礎上,結合了電子、機械、材料等多種學科交叉融合的前沿科研領域的不斷發展與成熟,從而出現了很多基于MEMS技術的傳感器,此類傳感器具有體積小、重量輕、低功耗、多功能等優點,在電子產品、航空航天、機械化工等行業中得到了廣泛應用。
傳感器的溫度補償方法大致可以分為兩種,即硬件補償和軟件補償。硬件補償方法主要是改變電路來達到補償效果,但是這種方法會導致電路的復雜化,同時提高了成本。軟件補償方法主要有最小二乘法、BP 神經網絡法、回歸法等。從計算的方便性和補償精度的準確性兩個方面,本文采取最小二乘法進行溫度補償。
1.姿態傳感器的溫度補償原理
本文采用美國InvenSense 公司生產的ITG?3205 三軸陀螺儀芯片,該芯片中內嵌有數字輸出溫度傳感器,因此可以隨時檢測出傳感器所處的環境溫度。在不同的工作環境溫度下,傳感器實際角度輸出值與理論角度輸出值會出現一定的誤差,稱之為溫度誤差。為了消除或者減少這種溫度誤差,利用最小二乘法進行曲線擬合,最終達到或接近理論角度輸出值。
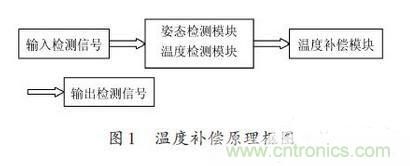
傳感器根據輸入的檢測信號,通過姿態檢測模塊和溫度檢測模塊采集相關數據,然后經過溫度補償模塊進行相應的溫度補償,最后通過輸出檢測模塊可得到預期的檢測信號。姿態傳感器的溫度補償原理如框圖1所示。
2. 姿態傳感器的溫度補償方法
在同一溫度下,不同角度的理論值與輸出值之間嚴格意義上是一種非線性關系,但是由于這種誤差值相對不大,可以近似的認為是一種線性關系,即y = mx + n 的線性關系。通過最小二乘法進行線性擬合,可以得出參數m 和n 的值。
此時可以發現,在不同的溫度下,所擬合出來的m和n 值是隨溫度的變化而變化的。在此情況下,必須找出溫度分別與m 和n 之間的關系,為此同樣可以根據最小二乘法再次進行曲線擬合,從而得出m 值與溫度之間的關系。同理也可以得出n 與溫度之間的關系。經過兩次曲線擬合之后,可以得出理論值與輸出值之間的誤差有了明顯的減小,并且滿足預期的要求。在實際應用中,為了達到高精度檢測的要求,可以通過測量多組數據進行曲線擬合的方法來實現。
3.姿態傳感器的實驗數據處理
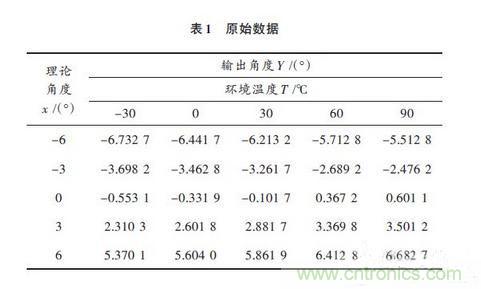
由于各軸的檢測原理是相同的,因此本論文采用x軸的檢測數據進行實驗驗證。主要的實驗儀器有被測姿態傳感器、經緯儀、高低恒溫箱、高精度角度檢測儀等。表1所得數據是未經溫度補償時的實驗數據,即原始數據。
3.1 第一次線性擬合
由于按照最小二乘法的基本步驟進行擬合的計算量比較大,所以本文采用Matlab進行數據處理,這樣不但可以減少復雜的計算過程,而且還可以保證較高的計算精度。
例如在溫度T=-30 °C的條件下,以理論角度x 為自變量,輸出角度y 為因變量,根據線性關系式y = mx + n ,計算出參數m 和n的值。具體計算程序如下:
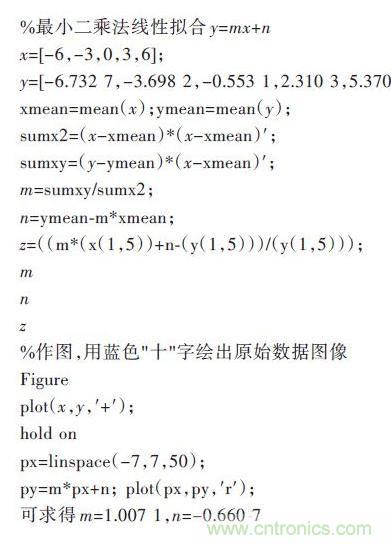
擬合圖像如下圖2所示。

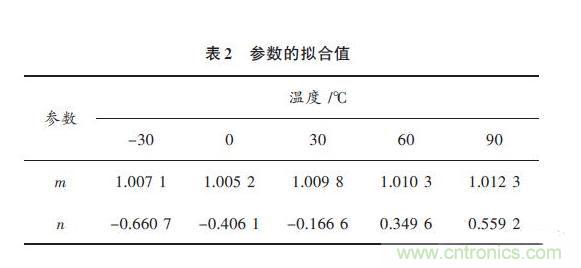
依次求出不同溫度下參數m 和n 的值,計算結果如表2所示。
3.2第二次曲線擬合
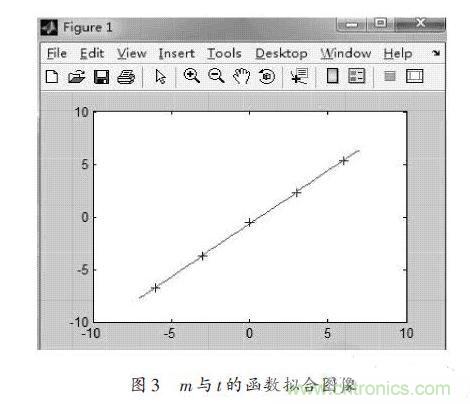
以參數m 為因變量,溫度t 為自變量,根據曲線擬合式mt = at2 + bt + c ,利用Matlab 求出a,b,c 的值,最終確定m 與t 的函數關系式。同理,可求得n 與t 的函數關系式。具體計算程序如下:
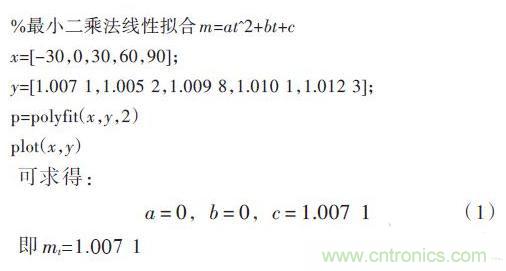
擬合圖像如圖3所示。
同理,求得n 與t 之間的函數關系式為:

4.實驗數據的驗證
傳感器未經溫度補償時的輸出為y = mx + n ,即在t ℃時,無補償輸出為:

根據式(1)、(2)、(7)可得補償后的輸出值。償后的數據如表3所示。在表1中未補償前的最大誤差角度為0.682 7°,表3中補償后的最大誤差角度為0.261 6°,相對減少的誤差角度為0.421 1°。
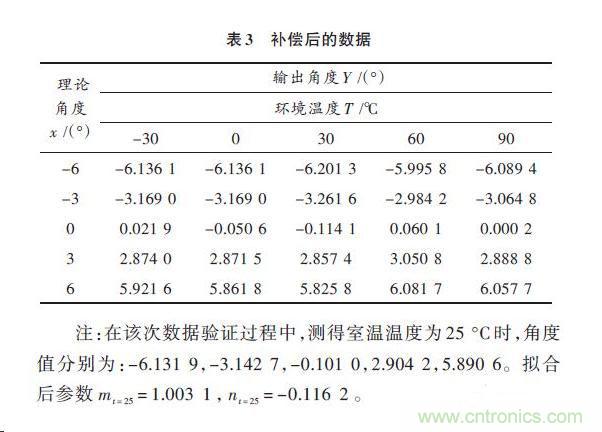
由表1和表3的數據對比結果可以看出,經過溫度補償后的姿態檢測精度相比補償前有了很大的提高。
5.結語
由數據對比得出,在環境溫度變化的條件下,利用最小二乘法進行溫度補償,可以達到預期的效果,因此這種方法可以運用到工程實際中。
推薦閱讀:
詳細介紹一下新能源電池分類、優勢及突破
如何正確選擇電動汽車中霍爾電流傳感器?
是時候尋找低成本DRAM替代方案了
嵌入式MCU如何滿足物聯網的需求?(二)
推薦閱讀:
詳細介紹一下新能源電池分類、優勢及突破
如何正確選擇電動汽車中霍爾電流傳感器?
是時候尋找低成本DRAM替代方案了
嵌入式MCU如何滿足物聯網的需求?(二)

