

【導(dǎo)讀】在未來的幾十年,推動這場新的移動革命的關(guān)鍵驅(qū)動力會是什么?最近幾家知名的老牌車企CEO們不約而同談了關(guān)于自動駕駛的未來技術(shù)的話題。我們得以一窺汽車廠商眼中的自動駕駛。
現(xiàn)在眾多老牌車企都已將自動駕駛作為戰(zhàn)略布局的核心,因為自動駕駛無疑將是自130年前汽車誕生后,最偉大的移動出行革命。
那么在未來的幾十年,推動這場新的移動革命的關(guān)鍵驅(qū)動力會是什么?最近幾家知名的老牌車企CEO們不約而同談了關(guān)于自動駕駛的未來技術(shù)的話題。我們得以一窺汽車廠商眼中的自動駕駛。
近日,奧迪新一代旗艦轎車 A8 正式誕生,除了標(biāo)志性的車燈和內(nèi)飾設(shè)計,A8 還成了全球首款實現(xiàn) Level 3 級別自動駕駛的量產(chǎn)車。
奧迪 CEO Rupert Stadler在接受媒體采訪時, 重點談到了奧迪自動駕駛系統(tǒng) Piloted Driving 的未來、高精地圖的重要性和客戶數(shù)據(jù)的安全管理等問題。他特別提到,高精地圖對于奧迪發(fā)展自動駕駛及相關(guān)服務(wù)的革命性意義。
另一家老牌車企的掌門人也持有接近的看法。戴姆勒董事局主席兼梅賽德斯-奔馳總裁Dieter Zetsche在幾個月前親自撰文談他眼中的自動駕駛,主要講述了 3D 高精地圖的重大意義,他甚至認(rèn)為這項技術(shù)“代表了自動駕駛的未來”。
圍繞自動駕駛的熱點,引發(fā)的一系列產(chǎn)業(yè)、技術(shù)、生態(tài)的變革和創(chuàng)新才剛剛開始,并將在持續(xù)推動產(chǎn)業(yè)和技術(shù)不斷突破現(xiàn)有邊界。
德爾福客座專家 Manu Namboodiri認(rèn)為,眼下的自動駕駛正在帶來創(chuàng)新高潮。因為,聯(lián)網(wǎng)和自動駕駛汽車不僅僅是融合了多項新技術(shù),它還在推動這些技術(shù)的研發(fā)、投資和創(chuàng)新,并不斷拓展其邊界。物聯(lián)網(wǎng)、3D高精地圖、計算機視覺、海量數(shù)據(jù)管理、邊緣分析、人工智能、云計算等等這些技術(shù)都將是推動自動駕駛汽車不斷發(fā)展的催化劑,同時,未來的汽車也無疑將是這些前沿技術(shù)最廣闊最重要的應(yīng)用場景之一。
車企“老司機”:3D高精地圖是汽車革命的開端
而對于推動這場新移動革命的眾多技術(shù)中,3D 地圖被車企“老司機”視作至關(guān)重要的功能。
戴姆勒董事局主席兼梅賽德斯-奔馳總裁Dieter Zetsche甚至認(rèn)為,對自動駕駛汽車來說,“下一個劃時代的功能則是 3D 地圖數(shù)據(jù),在下一場移動革命中它將成為關(guān)鍵驅(qū)動力”,并且這將影響每一個人。
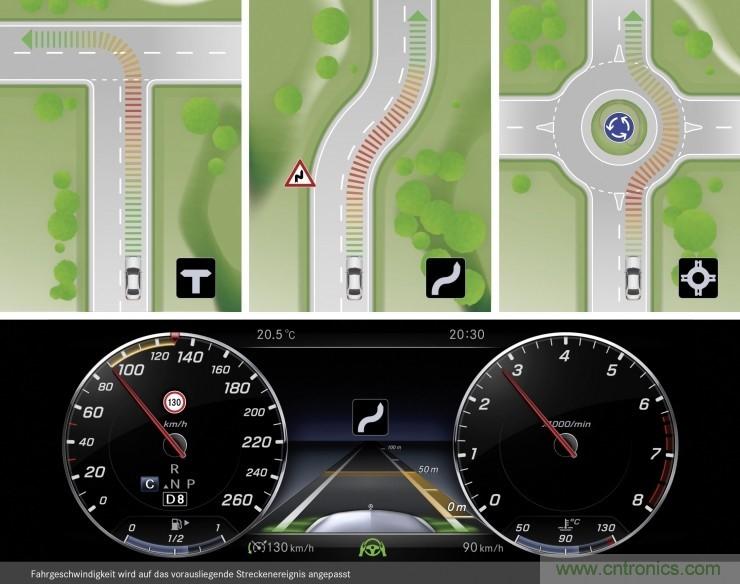
Dieter Zetsche特別指出,3D地圖將為車輛傳感器和攝像頭提供補充信息,且在增強安全性和便利性上潛力巨大,它將成為未來自動駕駛汽車上一個不可或缺的重要環(huán)節(jié)。“對全自動駕駛汽車來說,地圖必須極端精確且更新及時。想像一下,如果我們能有無數(shù)個地圖來源,每輛車都能在路途上搜集數(shù)據(jù)并與其他車輛進行實時分享,自動駕駛汽車又會是什么模樣呢?”
奧迪 CEO Rupert Stadler同樣十分看重地圖的作用。他認(rèn)為,實時地圖和基于地理位置的服務(wù)會為未來出行打下堅實基礎(chǔ),因為這將提升道路安全的同時,為其他出行服務(wù)的發(fā)展創(chuàng)造機會。
這也就不難解釋,為什么奧迪、寶馬、戴姆勒共同買下了地圖服務(wù)商 HERE。此外,Rupert Stadler還提到,奧迪、寶馬、戴姆勒三家車企公共出資收購HERE還保證了它將一直是一個獨立開放且創(chuàng)造價值的地圖數(shù)據(jù)庫。
“有了它奧迪才能保證自己未來重要技術(shù)的開發(fā),HERE 讓我們在與科技巨頭的競爭中扼住命運的咽喉。” Rupert Stadler表示。
在車企眼中,高精地圖對于自動駕駛未來發(fā)展的重要性可見一斑。
前幾天,現(xiàn)代汽車也宣布,其正和韓國政府合作,計劃在冬奧會上使用其研發(fā)的自動駕駛汽車,高精地圖將是其標(biāo)配。現(xiàn)代希望依靠高精度數(shù)字地圖,對抗天氣對部分傳感器的影響,保證汽車的正常行駛。由于多雪且道路曲折,平昌的氣候地形對于自動駕駛汽車具有很大挑戰(zhàn)性。這家廠商宣稱,其地圖誤差小于 10 厘米,是“世界上最好”的圖形。
需要指出的是,自動駕駛所需要的地圖與傳統(tǒng)的路線圖截然不同,它將更為強調(diào)空間的三維模型以及精度,其所許的全新的數(shù)據(jù)基礎(chǔ),必須將精度從米級降到厘米級,必須非常精確的顯示路面上的每一個特征和狀況,同時必須利用車輛上的匿名數(shù)據(jù)進行實時更新,幫助車輛知曉交通、天氣和事故等各方面信息。
自動駕駛汽車引發(fā)的技術(shù)創(chuàng)新熱潮
車企們認(rèn)為3D高精地圖將是推動新一輪汽車革命的關(guān)鍵驅(qū)動力,但這僅僅是開端。對于自動駕駛而言,是更為復(fù)雜的多種新技術(shù)的融合,這是個綜合性的大工程,并且它正在推動各項技術(shù)的研發(fā)、創(chuàng)新、投資,不斷突破現(xiàn)有邊界。德爾福客座專家 Manu Namboodiri近日總結(jié)了他認(rèn)為是“自動駕駛汽車創(chuàng)新的超級催化劑”的新技術(shù)TOP 11大名單。
其中,首先是物聯(lián)網(wǎng)技術(shù)。自動駕駛汽車搭載了數(shù)百個傳感器,它們將車輛周圍的物理世界轉(zhuǎn)化成了數(shù)字信號。而自動駕駛汽車傳感器的復(fù)雜性也讓它成了史上最強悍的物聯(lián)網(wǎng)產(chǎn)品。而未來隨著自動駕駛汽車功能的不斷增多,必定還將融入更多來自其他領(lǐng)域的物聯(lián)網(wǎng)解決方案和平臺。
其次是數(shù)據(jù)。包括海量數(shù)據(jù)管理、邊緣分析。如今,汽車正在成為人類歷史上最大的數(shù)據(jù)來源,自動駕駛系統(tǒng)和傳感器等設(shè)備產(chǎn)生的數(shù)據(jù)很輕松就能突破 TB 級別,而這些數(shù)據(jù)必須得到快速的處理和轉(zhuǎn)化。因此數(shù)據(jù)管理、數(shù)據(jù)庫、數(shù)據(jù)流分析、安全、數(shù)據(jù)比對、分布式計算和貸款管理等方面的創(chuàng)新已經(jīng)迫在眉睫。而邊緣分析的重要性則是在于——未來的自動駕駛汽車每秒可能就會產(chǎn)出數(shù)個 GB 的數(shù)據(jù)并做出上千次判斷,如果車輛不能獨立完成部分?jǐn)?shù)據(jù)的處理,而是將所有數(shù)據(jù)都一股腦送到云端并等待后臺的“總大腦”來反饋,那么其延遲根本無法接受。這也解釋了為什么英特爾等科技巨頭紛紛宣布開始向數(shù)據(jù)公司轉(zhuǎn)型。最近,英特爾還與愛立信、日本電裝、NTT、豐田汽車等成立了自動駕駛大數(shù)據(jù)聯(lián)盟,正式名稱為“自動駕駛邊緣計算聯(lián)盟”(Automotive Edge Computing Consortium,AECC)。
不過,雖然邊緣計算對實時分析和決策至關(guān)重要,但大量數(shù)據(jù)還是要回流到云端進行處理。因此,有一個強大的云計算能力會成為數(shù)據(jù)管理、應(yīng)用分析和運營、軟件升級、高清地圖、路徑規(guī)劃、支付、可視化、城市管理與診斷等功能的重要保障,保證自動駕駛汽車有最棒的生命周期體驗。
此外還有計算機視覺,它是自動駕駛汽車感知周邊環(huán)境的基礎(chǔ)性技術(shù),幫助汽車實時分析視頻流來理解交通信號燈、行人、路障和路標(biāo)等。同時,目標(biāo)探測、建模、路徑預(yù)測等工作也是計算機視覺技術(shù)一肩挑。除了要負(fù)責(zé)感知車外環(huán)境,計算機視覺技術(shù)還得分析車內(nèi)視頻流,及時發(fā)現(xiàn)駕駛員是否有分心等情況出現(xiàn)。此外,它還要進行相關(guān)記錄并對其進行事件關(guān)聯(lián)性分析。
自動駕駛汽車更帶動了多項技術(shù)的發(fā)展,包括安全技術(shù)、連接技術(shù)、軟件、能源、移動技術(shù)以及現(xiàn)在大熱的人工智能。這些技術(shù)隨著自動駕駛的發(fā)展,將被越來越多的應(yīng)用在汽車上。
(來源:汽車電子應(yīng)用)
推薦閱讀:

