
【導讀】毋庸置疑,傳感器獲取信號的準確度關系著整個工業自動化系統的測量和控制精度。未獲取更為真實準確的現場信號,要對計算機接入模擬傳感器輸出的模擬量電信號進行不失真的變換。本文提出了針對力和位移的傳感器輸入標定技術,經驗證,此法測量結果準確,且便于操作,具有良好的發展前景。
在工業自動化生產、自動控制系統、非電量電測系統中,廣泛使用了種類繁多的傳感器,在測量和控制過程中起著重要作用。傳感器獲取現場物理信號的正確與否,直接關系到整個系統的測量精度。
1 傳感器輸入通道
本文只針對模擬傳感器即輸出模擬量電信號進行討論,并不涉及有關數字傳感器。通常,計算機系統一般對傳感器的接入如圖1所示。

圖1 傳感器輸入通道
這里以力傳感器(多為mV級信號)為例,首先,經多路采樣開關采樣,進入放大器進行直流放大,最后放大的信號被送入ADC(模擬/數字轉換器),期間對快速瞬變的信號還須經采樣保持處理。ADC將放大后的模擬電壓信號轉換成數字信號,送入計算機系統的這些數字量信息,雖代表各種物理量參數值的大小,仍須經過標度變換(工程量變換),將它轉換成原來參數的真實值,以便進行顯示、計算和處理。
要保證計算機系統能獲取到現場真實被檢測信息,保證系統的準確度,有必要采取不失真的變換方法來獲取現場真實信息,對傳感器輸入通道的各個環節進行統一的標定。
2 輸入標定思想
一般情況下,位移輸入沒有類似力反饋的內部硬件增益。
圖2所示是力、位移傳感器輸入標定模塊圖。通常位移反饋信號(LVDT或電位計式)的放大計算類似力傳感器信號的放大,但是它們同樣需要計算增益,并使滿量程的最大最小值保持在±10V.
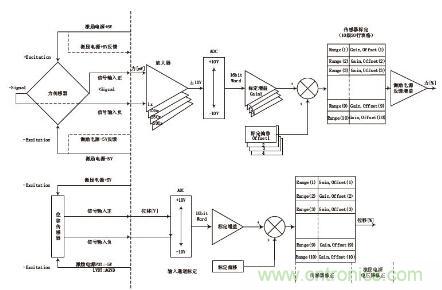
圖2 位移傳感器輸入標定模塊圖
圖3所示是力、位移傳感器輸入標定比較圖。
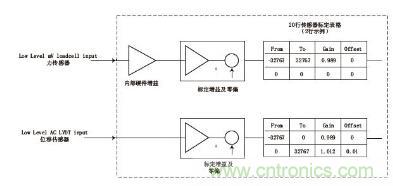
圖3 位移傳感器輸入標定比較圖
首先來研究力傳感器的輸入。與計算機系統連接的力傳感器,是一個連接有激勵電壓的惠斯通電橋,它能夠輸出以mV為單位的反饋信號[3].這個信號的強弱與激勵電壓有關,如激勵電壓采用10 V,要由非常精確的線性電源提供(內部或獨立的外置電源),力傳感器最終的輸出信號與在力傳感器上施加的外部力成比例,這個mV級信號即計算機系統測量的力信號。
[page]
其次是確定已選力傳感器靈敏度。力傳感器靈敏度是由計量部門使用標準測力機檢定得出的,并在力傳感器檢定證書中標明。例如,力傳感器靈敏度為1. 979 8 mV/V.
然后是確定硬件增益。為了使ADC獲得最佳的分辨率,這個mV級信號需要通過硬件增益來放大,以使信號盡可能逼近滿量程的±10 V.用戶確定特定力傳感器所需要的一擋增益是非常簡單的,如表1所列。
對于具有確定靈敏度系數的力傳感器來講,放大后的信號電壓范圍可采用如下公式進行計算:
放大后的信號電壓=激勵電壓值×力傳感器靈敏度×放大系數
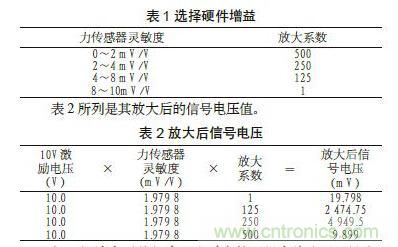
任何超過2 mV/V的信號都將導致總放大后的信號超過10 V和A/D轉換器輸入的飽和。這將被視為信號截斷,從而無法達到全量程測量。可以看到采用放大系數500時最接近10 V,表明沒有信號被截斷,因此它就是我們需要的最理想的放大系數。下面通過幾個方面來進行說明。
2.1 A/D轉換器
傳感器信號經過調理即放大后,就要被送入到ADC進行轉換。由于放大器和ADC本身有微小的誤差,通常有必要對數字輸出信號進行修正以便獲得一個更精確的信號。這通過輸入通道標定增益(Calibration Gain)和零偏(CalibrationOffset)來實現。
2.2 力傳感器修正
反饋信號隨后通過一個以10級20行表格形式構成的軟件放大器做進一步的修正。這個表格的目的是用來修正力傳感器的非線性,采用多步分段式的方法。通常力傳感器的非線性區出現在使用極限狀況下(100%量程),因此通常采用一個傳感器標定增益和零偏就足夠了。
2.3 力傳感器標定零偏
對于具有特定靈敏度的力傳感器,以下的例子計算結果都少于10 V,這表明沒有信號截斷。例如:
10×1.934 mV/V×500 = 9.670 V10×2.321 mV/V×250 = 5.800 V然而,±10 V的整個測量范圍卻沒有達到。為了使反饋信號放大到滿量程的最大、最小力,就要使用力傳感器標定增益(10級表格)。
為了快速確定力傳感器所需標定增益,一是用對應的理想最大輸入電壓除以實際放大后信號電壓,二是用對應的理想靈敏度除以實際靈敏度,表3和表4所列就是兩種計算力傳感器標定增益的方法值。


[page]
3 輸入標定過程
以力傳感器輸入通道的標定過程為例予以說明。力的標定過程分為兩部分進行。
3.1 輸入通道增益和零偏的標定
如采用一個獨立的精確電源作為輸入,返回信號需要通過一個1 MΩ的電阻連接到模擬地。避免由信調器電路的輸入電流的偏差而帶來的輸入電壓的不穩定。同樣,也需要測量激勵電壓在電纜末端的電壓值,并把它考慮進來。所以,強烈建議用戶采用標定盒來進行標定。
確定已連力傳感器的靈敏度,例如,力傳感器靈敏度為1.979 8 mV/V.
確定反饋信號量程范圍是從-10 ~ +10 V.為了能夠充分利用整個量程,最理想的辦法是采用放大系數,這個放大因子可以把反饋信號放大到±10 V范圍內。通過兩個步驟來實現,一是采用硬件增益,另一是輸入通道標定增益。
現以硬件增益為例,選擇能夠把反饋信號放大到小于或等于10 V的放大系數。可以看到采用放大系數500倍時最接近10 V,因此它就是我們需要的最理想的放大系數。必須確保最終電壓不超過極限(-10 ~ +10 V)。若超過了極限,可能出現無法預測的后果。
在確定了硬件增益后,再把一個mV級高精度電源或一個標定盒或參考力傳感器連接到計算機系統的傳感器輸入通道上。
由于放大器和ADC不是完全理想的,自身存在很小的誤差,達到的增益不可能確切就是所選擇的硬件增益。為了確保最終信號不會高于+10 V或低于-10 V,建議標定工作在滿量程的50%范圍內進行。
例如,與所選硬件增益500對應的理想靈敏度為:
10 V反饋電壓/(10 V激勵電壓×500)= 2 mV/V
需要注意的是,激勵電壓以+5 V、-5 V形式給出,而要以一個mV級高精度電源來仿真模擬力傳感器輸出信號,一般可選擇+10mV和-10mV作為輸出來模擬50%的載荷。這樣:
5 V激勵電壓(50%的10 V激勵電壓)×2 mV/V = 10 mV因此有:
10 mV×500 = 5 000 mV反饋電壓(50%的10 V反饋電壓)為力傳感器輸入通道施加代表50%量程的模擬信號輸入(10 mV),同時將力反饋拖入到軟件的圖形取樣窗口中,可以看到顯示的平均值接近50%.為了把這個值調整到準確的50%,就需要對輸入通道進行標定。選擇菜單中的“Calibrate”
按鈕,就可以打開如圖4所示的窗口。

圖4 輸入通道標定增益和零偏
對話框中的“Current Values”方框中顯示來自輸入反饋的mV電源、標定盒或參考力傳感器的當前電壓百分數值。“Unscaled value”應該顯示一個接近-50%的讀數。點擊“Copy”,把這“Unscaled value”復制到“Unscaled value”列的第一行。隨后,在“Scaled value”列的第一行中輸入我們的期望值(-50%)。
轉換mV級電源或力傳感器的極性。“Unscaled value”
應該顯示一個接近+50%的讀數。把這個值復制到“Unscaledvalue”列的第二行,并在“Scaled value”列的第二行輸入+50%的值。
現在,按下“Calculate(計算)”按鈕,軟件開始計算該傳感器輸入通道標定增益和零偏以達到期望的Scaled值。按下“Apply(應用)”按鈕,這些值將被保存到計算機軟件系統中。
3.2 力傳感器的增益和零偏標定
這個問題實際上就是力傳感器標定的設定,即參數表格中的增益和零偏。
上述輸入通道標定增益和零偏,都是以理想力傳感器靈敏度進行的,而最終實際的力傳感器靈敏度并不等同于理想力傳感器靈敏度,因此為了得到真實的力反饋信息,就需要對上述輸入通道的標定增益和零偏進行修正。方法如下:
(1)對實際力傳感器的靈敏度進行補償。修正系數利用公式計算:
修正系數=理想靈敏度(mV/V)/實際靈敏度(mV/V)示例:LC靈敏度修正系數= 2 / 1.979 8 = 1.010 2.
(2)系統的最終增益。利用公式計算:
系統的最終增益=輸入通道標定增益×LC靈敏度修正系數示例:系統最終增益= 1.004 37×1.010 2 = 1.014 61.
(3)將真實力傳感器連接到傳感器輸入通道后,用手拉或壓一下力傳感器來檢查增益的符號。如果不正確的話,給系統增益改變一下正負號。
(4)由于力傳感器自身的靜態零偏或施加在力傳感器上的質量,可以看到一個小的零點偏移。在軟件圖形窗口中看到的偏移值,從系統零偏(System offset)中加上或減去(如果需要的話)這個值。
(5)保存力傳感器的LC靈敏度修正系數、系統最終增益和系統零偏(Save the configuration)到軟件系統中。
至此,就完成了實際力傳感器的輸入標定。
結語
本傳感器(力、位移)輸入標定實現方法,首先按實際要接入的傳感器相對應的理想傳感器對輸入通道(硬件)進行標定,得到理想傳感器輸入通道標定增益和零偏;最后對實際要接入的傳感器(軟件)進行補償,得到系統最終增益及系統零偏。
這一方法可方便、精確地實現計算機系統傳感器輸入標定。譬如,一個力傳感器需要經常在計量部門標定,只需根據新標定的實際靈敏度,重新計算出LC靈敏度修正系數、系統最終增益及得到系統零偏,即可完成對該對力傳感器的輸入標定。這一方法已經在計算機測控系統得到應用,效果良好,值得推廣和借鑒。
相關閱讀:
拆解狂魔:一拆便知太陽能溫度傳感器
【安全系統應用篇】只需五步,輕松設計出電容式觸摸傳感器
【布局設計及應用實例篇】只需五步,輕松設計出電容式觸摸傳感器


