
【導讀】本文設計了一種智能地板,并基于該地板構建了一個定位系統,實現了通過PC機LabVIEW軟件和Android手機軟件查看智能地板上物體位置和運動路徑信息的功能。本定位系統最大定位絕對誤差在2 cm內,且具有環境魯棒性好、無負擔性等優點。
室內定位系統(Indoor Positioning System,IPS)是普適計算中的重要內容。隨著智能終端的普及、移動互聯網時代的來臨,復雜室內環境下的定位與導航的需求日益增大,同時,IPS在公共安全、移動電子商務等領域都有著廣泛的應用。目前,IPS采用的定位技術主要包括RFID、Bluetooth、WiFi、UWB、ZigBee、光學、超聲波、紅外線、地磁場等。采用單一定位技術的室內定位系統都存在一定的缺陷,如負擔性強、擴展性和魯棒性差、定位精度低、響應時間長等。因此,多種定位技術融合是IPS的一個發展方向。
壓力傳感觸控技術(Force Based Touch Sereen Technology)zTouch來自于美國F-Origin公司。該技術的原理是在剛性面板的四周角落處設置多個壓力傳感器,通過傳感器感知用戶在面板上觸摸或做手勢產生的垂直于面板的壓力,根據各點傳感器受力不同進行定位。該技術具有環境魯棒性好、持久性強、無負擔性以及三維信息感知、定位精度高等優點,應用于IPS可彌補其他定位技術的不足。目前,國外有多家機構正在研究基于該技術的定位系統,如英國蘭卡斯特大學的Weight Lab、英國謝菲爾德哈勒姆大學和德國亞琛工業大學的Smart Floor等。
本文基于壓力傳感觸控技術設計了一種智能地板,并采用該地板構建了一小型定位系統。系統采用16個壓力傳感器和4塊地板構建定位平臺,實現對平臺上運動小車的定位和路徑顯示,并能通過LabVIEW軟件和Android終端查看小車位置信息。
1 定位原理
壓力傳感觸控定位技術的基本單元由1塊剛性面板和4個壓力傳感器組成,壓力傳感器分布于剛性面板的四角處,形成一四支點結構。四支點定位模型如圖1所示。
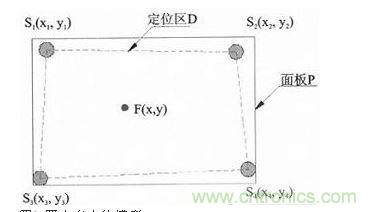
圖1 四支點定位模型
在圖1所示的模型中,Si(i=1,2,3,4)表示第i個壓力傳感器。在P平面的二維坐標系中,記Si與P平面的接觸點(或接觸面的中心點)的坐標為(xi,yi),4個接觸點構成的矩形區域(虛線框內)稱為定位區D。在D中任一點(x,y)處施加一垂直于P平面的力F,令Fi表示Si受到的F的分壓力,根據四支點平面物體重心位置計算公式,式(1)~(3)成立。
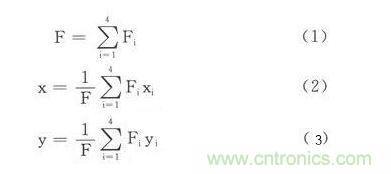
根據式(1)~(3),可計算出力F的位置,從而實現定位。
[page]
2 系統結構設計
2.1 系統設計
根據本研究的實驗條件,構建了一個針對小車的定位演示系統。系統由定位平臺、定位對象(小車)、數據采集卡、PC機、Android監視終端組成。當定位對象在定位平臺上靜止或運動時,通過分析傳感器的數據計算出其在物理空間中的絕對位置坐標(X,Y),該位置屬性經過映射,反映在上位機位置管理服務器(LabVIEW軟件)的虛擬地圖中。位置管理服務器可以構建虛擬場景,并可為移動終端提供位置查詢和導航的服務。定位系統構成如圖2所示。

圖2 定位系統構成
本系統采用USB-6259(BNC)采集定位平臺傳感器的數據。USB-6259(BNC)是美國NI公司生產的一款高速、多功能M系列的數據采集卡,提供有16路模擬輸入通道,其最高采樣率為1.25 Ms/s,采樣精度為16位,滿足系統要求。
定位系統可分為3個模塊:
①定位顯示模塊。該模塊實現在PC機端的LabVIEW平臺下,實時顯示小車在定位平臺的絕對位置及運動路徑。
②運動控制模塊。該模塊實現通過LabVIEW程序控制小車的運動,通過藍牙傳送控制指令,達到非接觸移動小車的目的,同時防止接觸方式產生的側向力對定位精度的影響。
③遠程監視模塊。該模塊實現通過Android手機遠程監視小車的位置,PC機通過互聯網向遠程終端廣播小車的位置信息。
2.2 定位平臺的設置
定位平臺由16個傳感器和4塊玻璃板組成,總面積為70×70 cm2,分為4個單元。傳感器采用輪輻式壓力傳感器(型號為BK-4)。傳感器自身集成有電橋,對外有4條引線,分別為電源Vbg、GND、信號+和信號-。由于傳感器輸出的信號微弱(μV~mV級),因此需要對信號進行放大。本系統采用的放大器為AD623。
為確保定位的準確,定位平臺需要調平。當定位平臺不平時,即當傳感器高度不一致,在圖1所示的四支點定位模型中可能會有1或2個支點處于不受力的懸空狀態,即“虛腿”現象。“虛腿”現象將改變四支點平臺力的分布,從而不能應用四支點公式求重心位置。周祖濂通過數學模型證明了在四支點結構中的四個支點能夠同時受力,即“虛腿”現象可以通過調平來避免。
四支點平臺的簡單調平通常采用向最高支撐靠攏的方法,即通過墊片調節4個支點中高度較低的3個,使其與最高支點高度一致從而調平臺面。本系統通過在傳感器下墊紙片的方法調平定位平臺。
3 系統軟件設計
本系統上位機開發平臺采用NI公司推出的LabVIEW 2013。設計的軟件界面如圖3所示。
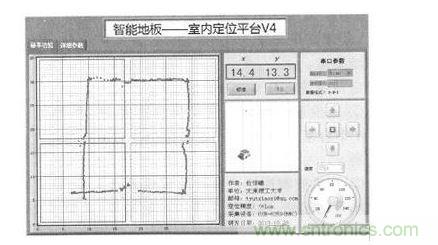
圖3 軟件界面
[page]
3.1 定位顯示模塊
定位顯示模塊的輸入為16個壓力傳感器的數據,經過濾波和計算,輸出為定位平臺上物體重心的位置。位置顯示方式包括文本坐標和二維圖片,路徑顯示方式為XY圖。定位顯示流程如圖4所示。
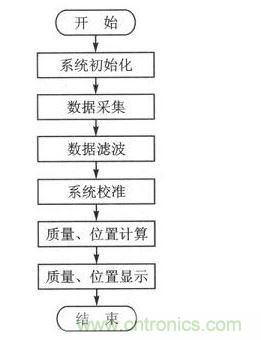
圖4 定位顯示流程
3.2 運動控制模塊
運動控制模塊是通過在PC機和小車間建立藍牙通信實現的。不具備藍牙功能的PC機可通過藍牙適配器和BlueSoleil軟件實現藍牙功能,小車端通過UART接口連接一藍牙透傳模塊,此時,PC機端和小車端建立了虛擬串口連接,LabVIEW端通過VISA串口通信編程實現向小車發送運動指令。本模塊可完成對小車的速度控制以及前進、后退、左轉、右轉、停止5種運動狀態控制。
3.3 遠程監視模塊
遠程監視模塊中,PC機為位置管理服務器,Android終端為客戶機,網絡架構采用分布式Publisher-Subscriber模式,PC機為所有注冊的Android終端提供位置查詢服務。
遠程監視模塊采用了跨平臺網絡通信插件SCCT。SCCT(Smart Phone&Cross-Plat-form Communication Toolkit,智能手機跨平臺通信包)是由T4SM(Tools for Smart Minds Software Solutions)公司研發的、支持多種平臺和編程語言的開發包,用于多種平臺與LabVIEW平臺之間進行數據通信。SCCT支持的操作系統包括Windows、Linux、iOS、Android、Phone7,支持的編程語言包括LabVIEW、Java、C、Object C、.NET和Javascript(HTML5)。本系統中,LabVIEW端采用SCCTPublisher Library提供的VI實現驗證請求連接的訂閱者身份、檢查連接狀態、廣播數據至所有活動狀態的訂閱者以及接收訂閱者請求的功能,Android端采用SCCT Subscriber Library提供的API實現發送請求至發布者、接收數據并提交至界面進行顯示等功能。
LabVIEW端信息發布程序框圖如圖5所示。Android端的軟件架構如圖6所示。

圖6 Android端軟件架構
[page]
4 系統測試與結果分析
Android手機端遠程監視界面如圖7所示。
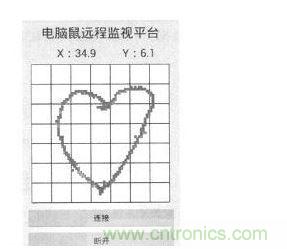
圖7 Android手機端遠程監視界面
經測試,本系統實現了對小車的定位顯示、運動控制和遠程監視的功能。
在定位精度的測試中,在平臺上畫有位置參照網格,網格邊長為1 cm。在定位平臺上隨機選取10個測試點,在每個點處施加壓力,測量6次,記錄軟件計算出的坐標,并與實際網格坐標進行比較。在數據分析過程中,定義以下概念:
①偏差Xp、Yp。假設在物理平臺上測試點的網格坐標取值范圍為X∈[a,b],Y∈[c,d](a、b、c、d為非負整數,b-a=d-c=1,單位為cm)通過軟件求得的坐標為(x,y),定義偏差Xp、Yp:
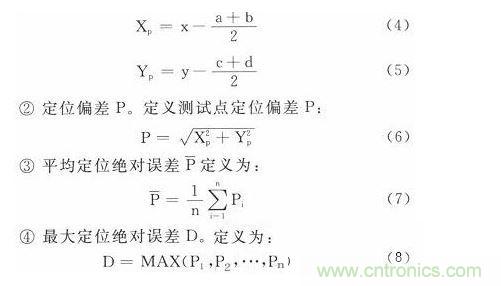
式中,MAX()為最大值;Pi為第i個測試點的定位偏差(cm)。
經測試,P=0.6 cm,D=1.8 cm。因此,單塊智能地板的定位絕對誤差在2 cm內。在智能地板特性不變的前提下,由多塊智能地板拼成的更大面積定位空間的定位絕對誤差也在2 cm內。
結語
本文設計了一種智能地板,并基于該地板構建了一個定位系統,實現了通過PC機LabVIEW軟件和Android手機軟件查看智能地板上物體位置和運動路徑信息的功能。本定位系統最大定位絕對誤差在2 cm內,且具有環境魯棒性好、無負擔性等優點,與其他定位技術結合,可彌補現有室內定位系統的不足。此外,本智能地板還可用于重點區域安防、隱私保護下的監控等場合。


