
【導讀】激光雷達(LiDAR)是一種測距技術(shù),近年來越來越多地用于汽車先進駕駛輔助系統(tǒng)(ADAS)、手勢識別和3D映射等應用。尤其在汽車領(lǐng)域,隨著傳感器融合的趨勢,LiDAR結(jié)合成像、超聲波、毫米波雷達,互為補足,為汽車提供全方位感知,為邁向更安全的自動駕駛鋪平道路。安森美半導體提供這全系列傳感器方案且技術(shù)遙遙領(lǐng)先,在單光子雪崩二極管(SPAD)和硅光電倍增管(SiPM)傳感器技術(shù)是市場領(lǐng)袖之一,提供完整的LiDAR方案,包括系統(tǒng)、傳感器、輸出和激光驅(qū)動器方案。
安森美半導體完整的LiDAR方案
1個LiDAR系統(tǒng)有6個主要的硬件功能塊:傳輸、接收、光束轉(zhuǎn)向、光學器件、輸出和電源管理。典型的LiDAR系統(tǒng)框圖如圖1所示。其中,安森美半導體可提供SiPM/SPAD、激光驅(qū)動器參考設(shè)計、電源管理、放大與處理以及時序、直方圖、點云生成乃至系統(tǒng)等。成熟的模擬SiPM 產(chǎn)品有C系列、J系列、R系列。系統(tǒng)有SiPM 陣列掃描LiDAR 演示儀(超過100 m掃描距離)、把SiPM 與圖像傳感器融合的FUSEONE、最新的400 x 100 SPAD 陣列Pandion。
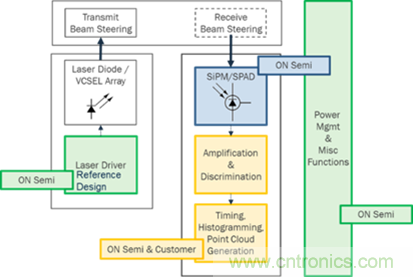
圖1:典型的LiDAR系統(tǒng)框圖
什么是SPAD、SiPM和ToF
SPAD是一種工作在蓋革模式(Geiger Mode)的光電二極管,就像光子觸發(fā)開關(guān)一樣,處于“開”或“關(guān)”狀態(tài)。SiPM是由多個獨立的SPAD傳感器組成,每個傳感器都有自己的淬滅電阻,從而克服單個SPAD不能同時測量多個光子的不足。飛行時間(ToF)指給目標發(fā)送光脈沖然后傳感器接收從目標返回的光所需的時間。通過光速和ToF,可計算出目標距離,概念很簡單,但卻受到現(xiàn)實世界諸多挑戰(zhàn),包括苛刻的環(huán)境如光照條件、低反射率目標及長距等。目前共有兩種ToF測量技術(shù):單激光脈沖法和多激光脈沖法。單激光脈沖法指每次測量單個脈沖返回的時間,要求高的信噪比(SNR)。多激光脈沖法指每次測量多個脈沖返回的時間,通過直方圖數(shù)據(jù)來獲得距離,若提高SNR可實現(xiàn)更遠距離的探測。ToF LiDAR可用于許多應用,如機器人、無人機、工業(yè)、移動、汽車ADAS和自動駕駛及增強實境(AR)/虛擬實境(VR)等。
SiPM和SPAD正成為新興的LiDAR探測器
SiPM和SPAD可探測距離超過200 m、5%的低反射率目標,在明亮的陽光下也能工作,分辨率極佳,且盡可能小的光圈和固態(tài)設(shè)計實現(xiàn)緊湊的系統(tǒng)集成到汽車中,并極具成本優(yōu)勢,正成為新興的LiDAR探測器。
汽車LiDAR傳感器要求
1. 嚴格的一致性
由于SiPM/SPAD工作在蓋革模式下,所以很難控制產(chǎn)品的一致性。安森美半導體是目前全球真正有能力大批量量產(chǎn)SiPM產(chǎn)品的供應商,其提供的數(shù)百萬傳感器的電壓和增益非常一致,易于系統(tǒng)校準和降低制造成本。
2. 符合車規(guī)(IATF 16949、AEC Q102、-40至1050C工作溫度、符合PPAP)
安森美半導體在汽車生產(chǎn)方面積累了多年的專業(yè)經(jīng)驗,有非常完善的車規(guī)產(chǎn)品的質(zhì)量監(jiān)督和控制體系,從一開始設(shè)計就考慮了汽車認證去設(shè)計傳感器和封裝。
3. 在905 nm處高的光子探測率(PDE)
安森美半導體的SiPM如今具有同類最佳的PDE,超過12%,2020年將達30%。
4. 高增益
SiPM的增益是雪崩光電二極管(APD)的1萬倍,是PIN二極管的100萬倍,串擾<20,提供出色的SNR。
SiPM 陣列掃描LiDAR 系統(tǒng)
該SiPM 陣列掃描LiDAR含16個905 nm 激光二極管、1個用于光束轉(zhuǎn)向的機電旋轉(zhuǎn)鏡、安森美半導體的單片1 x 16 SiPM 陣列和處理電子器件,視場角(AoV) 80°x 5.53°,脈寬1 ns,系統(tǒng)峰值功率400 W,系統(tǒng)尺寸22 cm x 18 cm x 13 cm。這系統(tǒng)采用1D陣列同時采樣多個垂直點,并結(jié)合水平單軸掃描,可獲得視場的完整圖像,實現(xiàn)長距低反射率目標的實時成像。
FUSEONE系統(tǒng):融合圖像和LiDAR
FUSEONE結(jié)合200萬像素汽車級圖像傳感器和基于SiPM的閃光LiDAR,通過軟件應用程序融合攝像機和LiDAR,獲得目標距離、移動速率等數(shù)據(jù),高靈敏度的SiPM 探測器和幻影智能算法實現(xiàn)增強的距離能力。由于無需機械式的雷達掃描,F(xiàn)USEONE極具成本優(yōu)勢。該系統(tǒng)采用8個SiPM和2個905 nm激光二極管,脈寬20 ns,峰值功率80 W,接收器光路徑采用43 nm帶通濾波器,Xilinx FPGA 用于邊緣處理全波形采集,AoV 為25° x 3.6°,在戶外20 klux的光照條件下,行人檢測達45 m,汽車檢測達85 m。
Pandion SPAD陣列實現(xiàn)長距掃描LiDAR
400×100 SPAD 陣列具有CMOS 邏輯器件,陣列尺寸14 mm × 3 mm,像素間距38.6 um,采用卷簾快門讀出(100通道并行讀出),被動淬滅主動復位(PQAR)特性可獲得<5 ns恢復時間,擊穿電壓達3.3 V以上。區(qū)別于傳統(tǒng)的點云,Pandion SPAD LiDAR已形成了圖像。
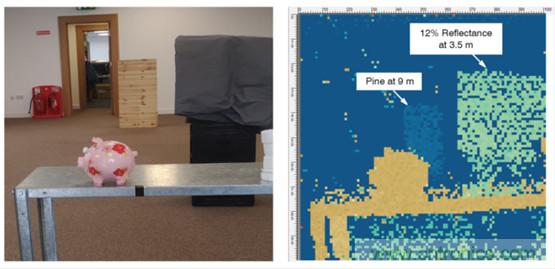
圖2:Pandion探測不同距離不同反射率的目標
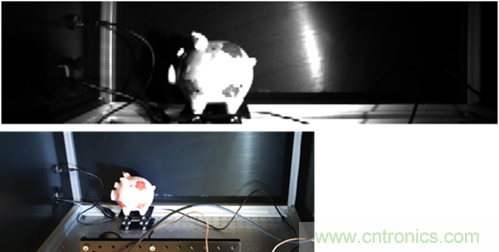
圖3:Pandion采用光子計數(shù)獲得的強度圖像

圖4:Pandion在微光水平下的強度圖像
總結(jié)
SiPM和SPAD技術(shù)是實現(xiàn)LiDAR系統(tǒng)中接收器功能的關(guān)鍵,基于蓋革模式雪崩原理,實現(xiàn)緊湊、高增益的傳感器,安森美半導體是這些技術(shù)的市場領(lǐng)袖,提供完整的LiDAR方案,包括SiPM傳感器、SiPM 陣列掃描LiDAR系統(tǒng)、融合SiPM閃光LiDAR和圖像的FUSEONE系統(tǒng)以及Pandion SPAD陣列,具有強固、性價比高、符合車規(guī)等優(yōu)勢,并積極研發(fā)創(chuàng)新,同時為設(shè)計人員提供廣泛的現(xiàn)場應用支援、相關(guān)的應用注釋和視頻庫、產(chǎn)品演示系統(tǒng)、經(jīng)驗證模型的仿真數(shù)據(jù)等,解決設(shè)計挑戰(zhàn)和推動創(chuàng)新。
推薦閱讀:


