

【導讀】隨著工業用高速數字信號處理器(DSP)的發展和應用,逆變電源控制由模擬控制向數字化控制的轉變成為了可能。由于具有超強的數據處理能力和很快的處理速度,配合高性能的AD變換器,DSP能夠瞬時地讀取逆變電源的輸出,并實時地計算出輸出PWM值。
正是DSP的采用,使得在模擬控制中存在的許多問題得到了很好的解決,并且一些先進的控制策略也逐漸應用于逆變電源的控制之中。這樣對于逆變電源負載的不確定性,數字化系統可以對負載動態變化產生的諧波進行動態的補償,而不需人為地干預,從而使逆變電源的輸出波形質量達到可接受的水平。
在傳統的逆變電源采用模擬控制無法克服其固有缺點的情況下,人們越來越多地求助于數字化方案來減小控制電路的復雜程度、提高電源設計和制造的靈活性,同時采用更先進的控制方法來提高逆變電源系統的輸出波形質量和可靠性。因此,由模擬控制向數字控制的轉變是逆變電源發展的必然趨勢。本文從SPWM逆變電源的結構出發,利用古老。的PID控制,提出了一種基于電壓瞬時值的數字方案通過了仿真。
逆變電源物理模型
在逆變系統中,多采用全橋或半橋結構。圖1為一個帶有LC濾波器的單相全橋逆變器的主電路結構圖。
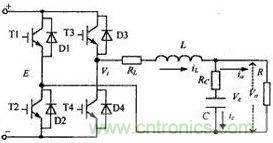
圖1:逆變器的主電路結構
以Vc和iL為狀態變量的狀態方程為:

那么Vi對輸出電壓V0的傳遞函數為:

由此可以得到逆變器的原理框圖,如圖2所示。
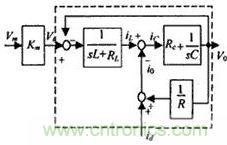
圖2:逆變器的原理框圖
數字控制方案
本系統采用雙環控制的PID調節。PID控制以其簡單、參數易于整定、發展成熟之特點,廣泛應用于工程實踐之中,逆變電源的控制也不例外。雙環控制既保證了系統的穩態特性,又可以提高系統的動態性能。
數字PID算法
PID控制是應用最廣泛的一種控制規律,PID表示比例(proportional)一積分(intergral)一微分(differentia)。設PID調節器如圖3所示。
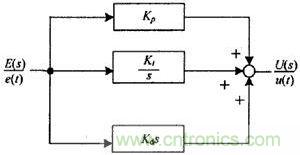
圖3:PID調節器的方框圖
調節器的輸出與輸人之間為比例積分一微分的關系,即:
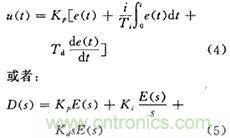
若以傳遞函數的形式表示:
其中:Ti為積分時間常數;Td為微分時間常數;Kp為比例系數;Kd=Kp/Ti為積分系數;Kd=KpTd為微分系數。
在計算機控制系統中使用的是數值PID調節器,就是對式(1)的離散化,離散化時,令:

其中:丁是采樣周期。
顯然,上述離散化過程中,采樣周期T必須足夠短,才能保證有足夠的精度。由式(4)和式(7)可得到:
式(8)即數字PID調節器的輸出輸入關系式。
PID算法蘊含了動態過程中過去、現在和將來的主要信息。其中比例(P)代表了目前的信息,起校正偏差的作用,使過程反應迅速。微分(D)在信號變化時有超前控制作用,代表了將來的信息。積分(1)代表了過去的信息,他能消除靜差,改善系統的靜態特性。因此,設計好的PID控制器有動態響應快、穩態精度高、魯棒性強的優點,是工程實踐中應用最為廣泛的一類控制器。對于逆變電源,由于空載的SPWM逆變器近似于臨界振蕩環節,積分作用會增加相位的滯后,這樣會對系統的穩態性能產生負面的影響,所以在設計瞬時值反饋的PID控制器時總是采用比例控制(P)或者比例微分(PD)控制。
數字控制方案
控制系統的框圖如圖4所示。
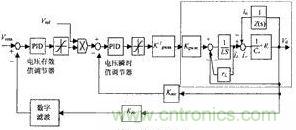
圖4:系統控制框圖
該系統包括2個控制環:外環為電壓有效值控制環,內環為輸出電壓瞬時值反饋環。外環進行數字濾波,得到輸出電壓的有效值;和輸出有效值給定Vrms,進行比較,其誤差信號再經由PI控制器進行調節控制標準正弦波信號的給定值的幅值。逆變電源通過有效值外環控制,理論上可以做到輸出電壓有效值穩態無差,該控制環的目的是為了保證當負載變化、系統受干擾后維持輸出電壓有效值的穩態不變,即保證系統的輸出電壓穩態精度。內環為輸出電壓瞬時值反饋控制環,該環對輸出電壓的瞬時值進行控制,使得輸出電壓跟蹤給定的正弦波,維持輸出的良好正弦性,為了保證系統有足夠的穩定裕度,該環的控制器多采用比例(P)控制器,或者比例微分(PD)控制器。該環的主要作用是為了保證輸出電壓的正弦性,克服干擾對輸出電壓波形的影響,改善控制系統的動態性能和穩態性能。
仿真結果
下面在Matlab的圖形仿真環境Simulink中對圖1所示的瞬時值反饋數字PID控制的逆變電源的各種特性進行分析。電路參數為:額定功率:P= 6kVA;濾波電感:L=1 mH;濾波電容:C=25μF;等效串聯電阻rL=0.6Ω,rc=0.1Ω;直流母線電壓:E=360V;開關頻率:fc=20kHz;輸出電壓: 220V/50Hz;系統在空載及不同的負載時仿真波形如圖5所示。
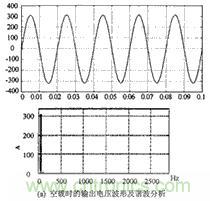
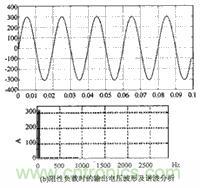

圖5:逆變電源輸出電壓波形諧波分析
詳細分析了SPWM的物理結構和數字PID算法,并在此基礎上提出了基于輸出電壓瞬時值反饋的雙環逆變電源數字控制系統。他能很好地減小輸出波形總諧波畸變(THD),改善了逆變電源系統的輸出波形質量。數字PID控制算法的合理運用保證了系統輸出電壓的穩定精度及良好的動態性能和靜態性能。




