

首先,我們要對比不同的LED驅動電路,以確定最佳方案。
連接電壓源
眾所周知,LED 燈(或二極管)在具有足夠正向電壓(VF)時開始導通。導通時其正向電流通常會發光。根據這個基本知識可以得出圖1a中的第一種選項,不過這樣行不通。因為 LED 電流是其電壓偏置的指數函數(公式1),LED 燈的光強度對該電壓非常敏感。大多數情況下,大電流條件通常會將原本長壽命的LED變成昂貴的閃光燈泡。
![]()
下面是圖1a行不通的原因所在。在公式1中,IS、RS是常數,取決于LED產品本身,與VT是熱電壓無關。假設串聯電阻RS是理想值零,那么僅0.1V的VF變化就會產生47倍的ILED差異。

例如,20mA的目標LED電流值在其偏置電流出現僅0.1V的差異時就會跳變至1A。即使考慮實際RS值,真實LED器件在具有0.1V偏置差異時仍會出現10至20倍的差異。

圖 1.對比三種LED驅動電路
支持流限電阻器的電壓源
現在我們來看看圖1b。添加一個限流電阻器RLIMIT來保護LED燈。由于有限流電阻器,因此該燈不會被燒壞。在視頻顯示器應用領域,這種方法在控制LED光強度方面仍然不夠好。LED曲線和RLIMIT產生的負載曲線可決定其LED電流值。如紅色或藍色標記所示,該LED和電阻器分別存在制造誤差造成的正向電壓變化及電阻變化。這些誤差因素會使LED電流(綠)產生不可忽視的變化。
恒流源
圖1c采用恒流電路而非電阻器。該恒流驅動器電路可直接將LED電流調節為目標值。無論LED燈在制造過程中會產生多少VF變化,LED都會傳導特定的電流值。LED燈的光強度與通過 PN 結點的電荷緊密相關,因此該恒流驅動器是從LED燈獲得統一光輸出的理想方法。
此外,我們都知道集成電路(IC)可提供良好的匹配電路對。這也是選擇恒流法的另一個優勢。圖2是LED驅動器的基本輸出級結構。市場上很多LED驅動器IC都有參考電流設置端 IREF,該參考電流是鏡像到其輸出端的恒流。
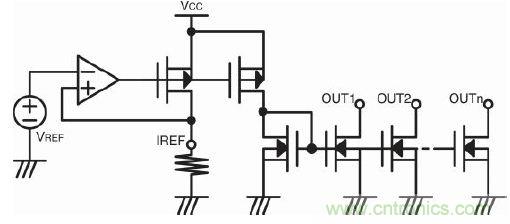
圖 2. LED 驅動器IC的基本輸出配置
圖2是該討論的結果,即LED驅動器的基本輸出電路配置。
色彩驅動
到目前為止,我們已經能夠確定如何驅動單個LED燈了。下一步是為視頻顯示系統實現全色彩光輸出。通過組合光的不同深淺紅綠藍三原色(RGB),任何色彩都可生成。較為熟悉的示例是采用個人計算機(PC)上的色彩選擇工具。
數字或模擬的灰階控制
PC 操作系統將三種色彩混合為256個色階(每階8個二進制位)或更多,以顯示全彩色像素。對于LED顯示系統而言,也需要采用相同概念的色階色彩強度控制,以便在LED驅動器設計中實現色階控制或灰階控制。
首先應決定使用數字控制還是模擬控制。前面已經介紹過,經過 PN 結點的總電荷數可決定光強度,因此數字和模擬方法均可控制光強度。圖3是數字和模擬法中的50%灰階控制。在總體256個色階的示例中,該50%表明了一個有128個灰階的目標。
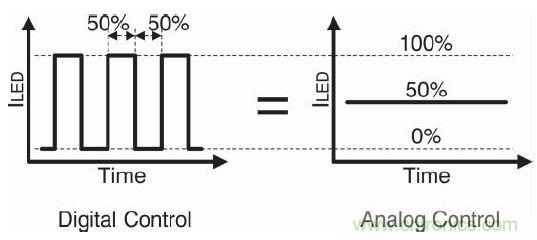
圖 3.數字和模擬的50%強度控制
LED 電流與色彩變化
這時候,需要考慮電流變化對LED光輸出波長值的影響。改變波長就意味著改變人眼看到的色彩。圖4是綠色LED燈的實例。通常在業界,510nm 廣泛代表綠色。因此,大部分LED燈制造商所設計的LED燈產品在最大額定電流下都具備510nm的波長。在圖4中,隨著LED電流的升高,波長可達到510nm。獲得綠色的最佳方法是盡量使燈的驅動電流接近最大額定值。這也就說明了為什么使用數字控制比使用模擬控制好。
選擇數字控制的另一個優勢是便于以數字電路模塊的形式對LED驅動器IC實施控制。對于256階的灰階控制而言,數字控制的成本比模擬控制低。
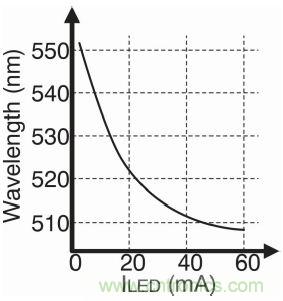
圖 4.綠色LED電流與波長實例
這種ON/OFF 數字控制稱之為脈寬調制(PWM)控制,或者PWM調光。現將PWM控制開關添加至圖2。
RGB LED燈可平鋪構成2維(2D)影像。
顯示系統結構
RGB LED燈可用于構成正方形的基礎結構或模塊。它通常包含一塊PCB以及一個16×16至64×64的像素陣列,不同的應用有所不同。可將多個模塊組合在一起,構成機械系統結構或面板。LED顯示系統廠商通常提供各種面板。每個面板都有機械框架,可放置多個模塊。它包含一個或多個控制單元,用以提供電源分配、數據接口和處理器。在構建體育場大屏幕或路邊廣告牌等顯示系統的現場,可安裝多塊面板構成最終顯示屏。在施工現場,每塊面板的所有數據線和電源線都會集中在中央控制單元。
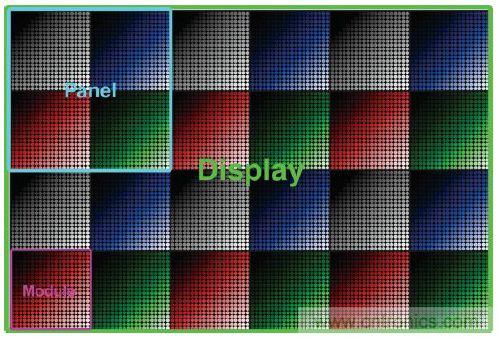
圖 5.LED 顯示系統由模塊/面板/顯示屏組成
像素間距
一套LED顯示系統包含大量的LED燈和一個大電源。設計系統時需要重點考慮LED燈的密度優化問題。LED 燈的該密度稱為每個像素的距離或像素間距。如果像素間距太密,一旦超出了人眼能識別的精度,它就不會改善影像輸出質量,而且會增加成本。人眼可識別的兩個單光源是在這兩點形成1個弧度的1/60(=1 弧分)時。
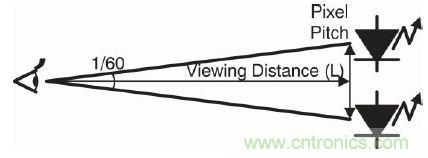
圖 6.人眼可識別的分辨率
圖6是如何計算人眼可分辨像素間距Dpp1。如公式3所示,其中L為視距。
在最佳實踐中,DPP1可視為過大,對于高質量視頻系統而言三倍Dpp1就夠好了。在公式4中,DPP是指導標準。
公式4 的簡單記憶方法是:所需的像素間距(毫米:mm)=“視距”(米:m)
例如,5m視距的系統需要5mm像素間距來實現良好分辨率。另一個視覺實例如圖7所示,圖中展示了過低像素間距如何降低輸出影像質量。像素間距為12.5mm 的影像(上)看起來很粗糙,無法近距離辨識。但保持一定的距離觀看時影像開始變得清晰,與觀看像素間距為5mm的影像(下)類似。這個實例清楚地說明了視距與像素間距的關系。
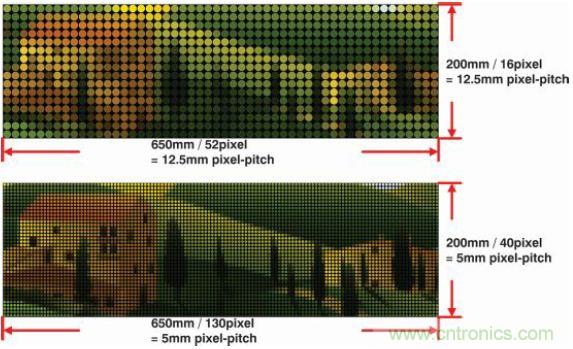
圖 7.不同像素間距與視距的對比
靜態驅動器與時分復用驅動器
從圖2可以看出,LED燈的陰極采用當前市場常見的LED驅動器IC驅動。這里要討論LED燈的陽極驅動器電路。陰極采用恒流驅動器有優勢,陽極希望也只提供足夠的電壓。但仍需做出如何驅動陽極的重要決定!
圖8 對比了靜態陽極驅動器系統與時分復用陽極驅動器系統。靜態陽極驅動器配置十分明確:一個LED驅動器IC驅動一個LED。在設計具有大量像素點的系統時,靜態陽極驅動器需要大量LED驅動器IC。相反,時分復用陽極驅動器系統讓多個LED燈共享一個IC,因而使用的LED驅動器IC數量較少。時分復用驅動器的權衡在于輸出LED光強度會因分時而降低。
在戶外顯示系統中,需要極強的LED輸出來克服太陽光亮度,以便人眼能看清楚影像。在這種戶外系統中,更適合選用靜態陽極驅動器。另一方面,在室內系統中,時分復用陽極驅動器則是降低系統構建成本的好方法。
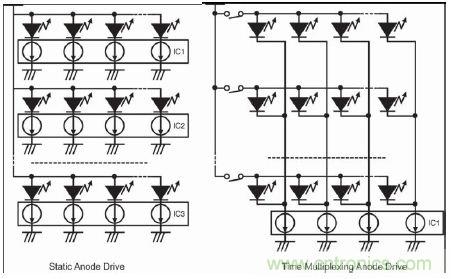
圖 8.靜態陽極驅動器與時分復用陽極驅動器
如何創建電影/視頻影像
幀速率/幀刷新率
老式模擬電視通常在一秒鐘內顯示24張不同的靜態影像,幀速率為24。當模擬電視攝像機拍攝另一個模擬電視屏幕時,可產生由視頻影像與黑色條帶構成的斑馬紋混合畫面(圖9)。這種現象由同步電視攝像機和電視屏幕掃描率引起。在拍攝LED屏幕的攝像機采用時分復用陽極驅動器時,也會出現相同的問題。應用實例包括使用電視攝像機拍攝背景墻壁上由LED顯示器放大演員的舞臺影像或者用電視攝像機拍攝體育場中體育賽事比分牌或標牌等。要避免這個問題,LED顯示器現在需要比攝像機系統運行得更快,特別是在專用LED顯示器市場。
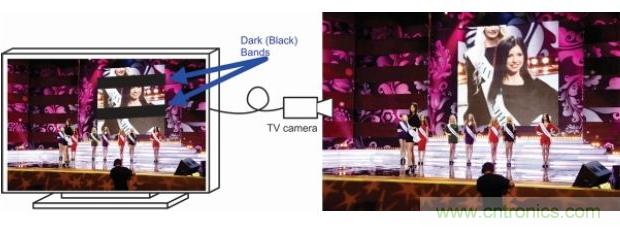
圖 9. 電視攝像機拍攝另一個電視屏幕引起的黑色條帶
為滿足更快運行這一要求,很多LED顯示系統都在一個幀周期內反復顯示相同的影像,稱為幀刷新率。圖10是幀速率與刷新率的關系。只有兩張幀影像:A 和 B。每個幀重復“影像 x”兩次。因而本實例“幀刷新率”= 2 ד幀速率”。
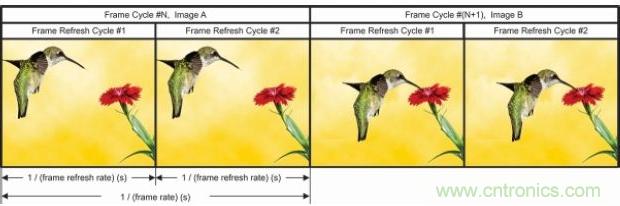
圖 10.幀速率與幀刷新率
在普通LED顯示系統中,幀速率在50Hz至120Hz的范圍內,而幀刷新率則介于50Hz至2kHz之間。
ON/OFF 控制驅動器或 PWM 控制驅動器
為了滿足系統幀速率與刷新率的需求,需要在實施邏輯電路的兩種方法中做出選擇。第一種是ON/OFF控制驅動器,而第二種則是PWM控制驅動器。
圖11a是采用ON/OFF控制IC的系統,具有每個位對應于一個輸出的ON/OFF寄存器。寄存器位的邏輯高可打開對應的輸出,而邏輯低則可將其關閉。
圖11b是采用PWM控制IC的系統,具有一個可參考時鐘計數器的灰階參考時鐘輸入端。另外,該IC還具有一組保存灰階邏輯代碼的寄存器。PWM 比較器可通過計數器和灰階 (GS)寄存器比較和生成PWM輸出模式。
對于這兩種類型的驅動器IC而言,兩種工作都是并列執行的:
- 恒流驅動器模塊根據當前顯示周期數據的輸入驅動其LED燈陣列;
- 并將下一個顯示周期的數據接收在移位寄存器中。
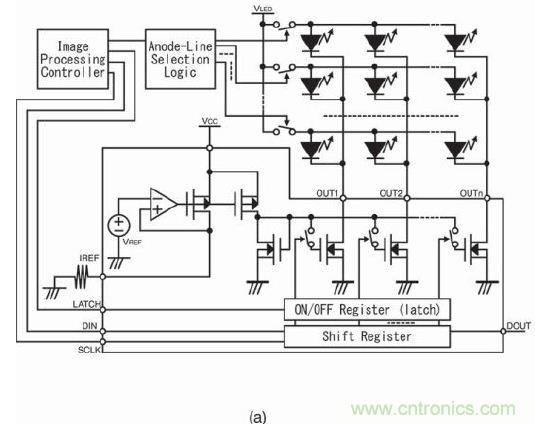
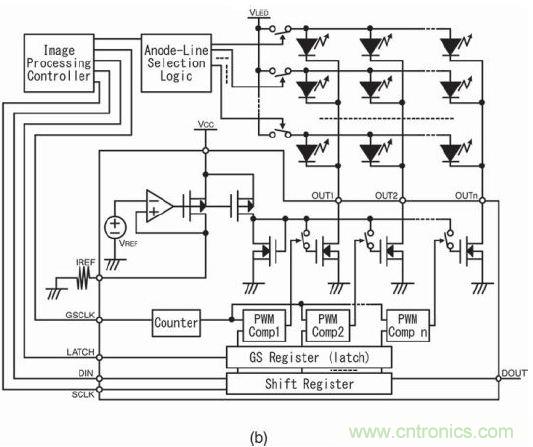
圖 11.采用ON/OFF控制IC和PWM控制IC的LED顯示系統
總結
縱觀全文,我們介紹單個LED燈的驅動器電路,再討論詳細的LED燈物理特性、顯示系統的物理布局與結構以及靜態及時分復用控制,進而得出完整的LED驅動器IC結構。然后我們介紹影像處理控制器IC與LED驅動器IC之間的數據傳送,并舉出實例。還探討與LED顯示驅動器IC有關的特性主題。


