
中心議題:
- 智能路燈控制器硬件電路設計與功能描述
- 智能路燈控制器系統(tǒng)軟件設計
摘要:隨著城市現(xiàn)代化建設步伐不斷加快,傳統(tǒng)的路燈控制器,存在難以集中管理、浪費電能等缺點。因此使用自動化程度高、運行可靠、高效節(jié)能、維護方便、具備遠程監(jiān)控功能的智能路燈控制器成為了路燈控制和管理的發(fā)展趨勢。本文利用AT89S8252單片機為核心設計了基于公用電話網(wǎng)智能路燈控制器的硬件電路與軟件流程,該路燈控制器性能穩(wěn)定,工作可靠,消除了傳統(tǒng)控制方法的弊端,為城市路燈控制提供了理想的應用方案。
1 引言
隨著各城市對路燈照明的重視, 路燈照明的管理、監(jiān)測、控制和維護的工作量增大,人力物力資源有限的問題日益突出。為提高路燈管理效率,需要一種新型的路燈遠程監(jiān)控系統(tǒng)。目前,遠程監(jiān)控系統(tǒng)通常采用上下位拓撲結構,而且下位機經(jīng)常為無人職守形式。遠程監(jiān)測系統(tǒng)中通信采用的物理鏈路有: 現(xiàn)場總線形式, 如CAN、RS-422/485 等;Internet 形式;PSTN(公用電話網(wǎng))形式。現(xiàn)場總線形式受通信距離的約束,遠程能力有限,例如CAN 總線的直接通信距離最大為10Km,第2 和第3 兩種形式,雖在距離上沒有限制,但對硬件的要求和實現(xiàn)的途徑各不相同。從目前的技術條件及從通信距離、實時性、可靠性與安全性等諸多方面的綜合*價,基于公用電話網(wǎng)(PSTN)的遠程監(jiān)控系統(tǒng)更適合一些。故針對路燈管理處設備陳舊、可靠性差、設備有限、投資少、故障多、線路多、管理維護不方便等情況,選擇 PSTN 通訊方式,設計開發(fā)基于AT89S8252 智能路燈控制器, 對城市路燈運行狀態(tài)進行遠程智能監(jiān)控。
智能路燈控制器是系統(tǒng)的主要組成部分。它關系到上位機與路燈控制器的信息交互, 是系統(tǒng)信息交換的樞紐。智能路燈控制器既可以起到上傳下達的作用,也可以單獨對路燈進行控制。它與上位機是采用PSTN 通信,完成控制器運行數(shù)據(jù)的傳輸。這樣既可以實現(xiàn)遠程通信,也可以節(jié)約線路成本。控制更為精細。系統(tǒng)構架如圖1所示。
遠程監(jiān)控系統(tǒng)構架圖
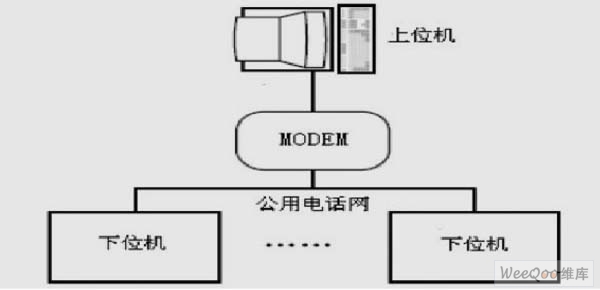
圖1 遠程監(jiān)控系統(tǒng)構架圖
2 智能路燈控制器硬件電路設計與功能描述
2.1 測量電路
在測量電路中, 采樣電路需要采集三相電壓信號和四相電流信號(包括零線電流) 。本系統(tǒng)采用直流采樣法。電壓變化電路如圖2 所示。
電壓變換電路
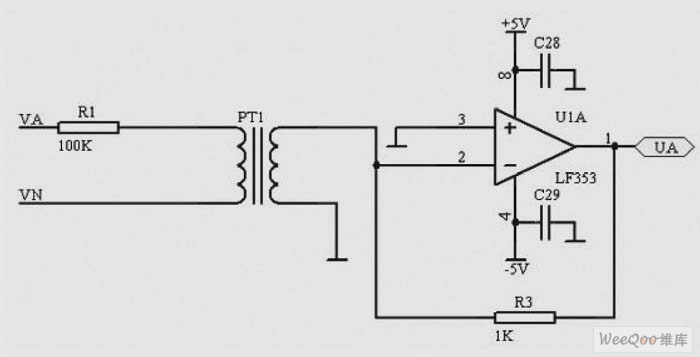
圖2 電壓變換電路
圖2 中PT1 是一種電流型電壓互感器,A 相輸入電壓經(jīng)限流電阻R1(100K),使PT1 初級(原邊)的額定電流為2.
[page]
2mA,次級(副邊)會產(chǎn)生一個相同的電流。通過運算放大器(LF353),用戶可以通過調節(jié)反饋電阻R3 的值在輸出端得到所要求的電壓輸出。以標準工頻電壓220V 為例,可以算出轉換后A 相電壓有效值為:,轉換后的電壓信號滿足各元器件的輸入電壓要求。
電流變換電路采用精密電流互感器CTY205A(CT1),電流變化電路如圖3 所示。
電流變換電路
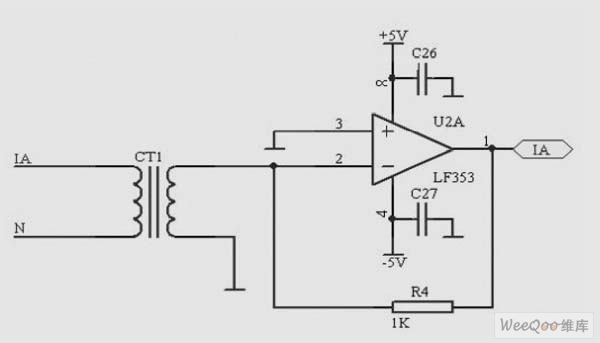
圖3 電流變換電路
通過運算放大器(LF353)的作用,用戶可以調節(jié)反饋電阻R4 的值在輸出端得到所要求的電壓輸出。以電流(交流值AC)5A 為例,電流互感器轉換出來的電流信號為:,轉換后的電流信號滿足系統(tǒng)各元器件的輸入電壓要求。
電壓電流經(jīng)互感器變換, 輸入雙四選一譯碼器, 微處理器通過控制電壓、電流值進行多路轉換。選用LF353 連接成射極跟隨器,起到隔離、跟隨的作用。多路轉換模塊如圖4 所示。電壓電流監(jiān)測模塊選用有效值轉換芯片AD536 計算輸入的復雜的交流值AC 的均方根值, 輸出一個等效的直流值D C 。再輸入系統(tǒng)中的ADC 轉換電路。電壓電流監(jiān)測模塊如圖5 所示。
多路轉換模塊
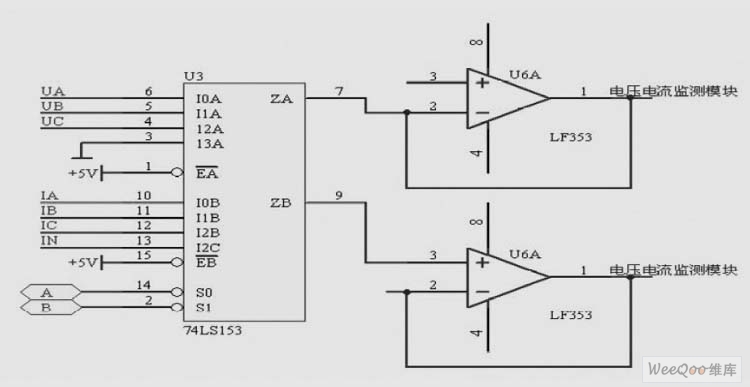
圖4 多路轉換模塊
電壓電流監(jiān)測模塊
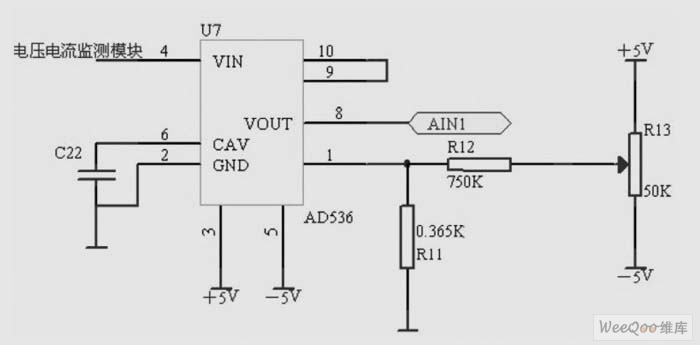
圖5 電壓電流監(jiān)測模塊
[page]
電壓電流監(jiān)測模塊所采集的兩路信號需經(jīng)過模數(shù)轉換器變換后輸入控制器,因此選用DS2450 模數(shù)轉換接口芯片。DS2450 是DALLAS 公司生產(chǎn)的一線式4 通道逐次逼近式A/D 轉換器,其輸入電壓范圍、轉換精度位數(shù)、報警門限電壓可編程;每個通道有各自的存儲器以存儲電壓范圍設置、轉換結果、門限電壓等參數(shù);普通方式下串行通信速率達16.3kbps,超速工作時速率達142kbps,片內16 位循環(huán)冗余校驗碼生成器可用于檢測通信的正確性;DS2450 采用8 引腳SOIC 小體積封裝形式, 既可用單5V 電源供電, 也可采用寄生電源方式供電。電路正常工作時僅消耗2. 5mW 功率,不工作時消耗25 μW。CPU 只需一根端口線就能與諸多一線式芯片通信, 占用微處理器的端口較少, 可節(jié)省大量的引線和邏輯電路。模數(shù)轉換接口電路如圖6 所示。
模數(shù)轉換接口電路
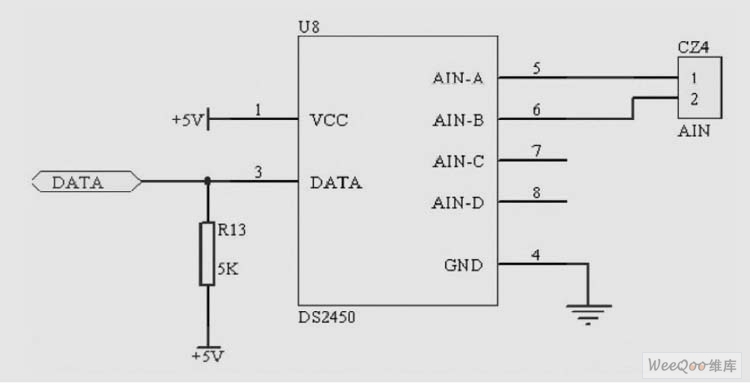
圖6 模數(shù)轉換接口電路
2.2 顯示與時鐘電路
控制器具有良好的人機交互能力,采用160x128 點陣帶背光LCD 顯示屏,可顯示漢字和西文字符。驅動部分是T6963C 控制液晶顯示驅動系統(tǒng)的接口[5]。它由液晶顯示時序發(fā)生器、圖形數(shù)據(jù)鎖存器、文本數(shù)據(jù)鎖存器、顯示選擇器、串行傳輸電路以及液晶顯示數(shù)據(jù)輸出接口等組成。操作人員可按照LCD 顯示屏的提示,通過按鍵設置開關路燈控制方案、運行控制數(shù)據(jù)、狀態(tài)數(shù)據(jù)等,智能路燈控制器運行時,比照開關路燈時間與DS1302 的時間信息,驅動路燈動作,能夠有效節(jié)約系統(tǒng)建設投資,取代現(xiàn)有鐘控制器、光控制器。顯示與時鐘電路如圖7 所示。
顯示與時鐘電路
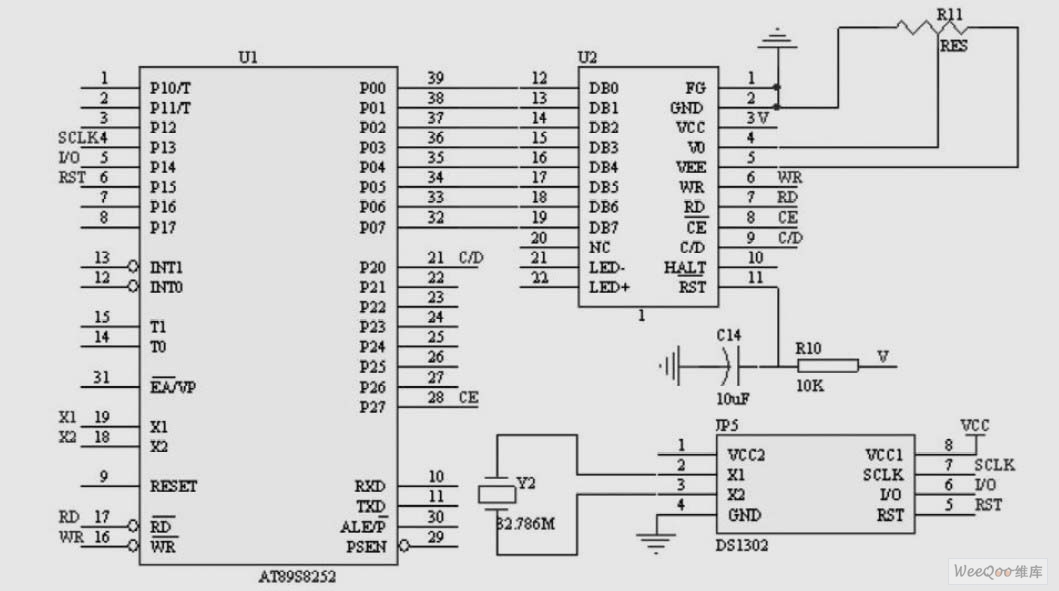
圖7 顯示與時鐘電路
[page]
2.3 輸出電路
控制器將P2.1-P2.5 口作為路燈控制輸出的IO 口,輸出電路中應用反向器驅動達林頓管, 達林頓管的集電極和發(fā)射極之間連接正泰12V 5A 繼電器,將繼電器的三個無源觸點引出, 配合外圍接觸器驅動路燈。電路利用發(fā)光二級管作為通電指示。路燈驅動電路如圖8 所示。
路燈驅動電路
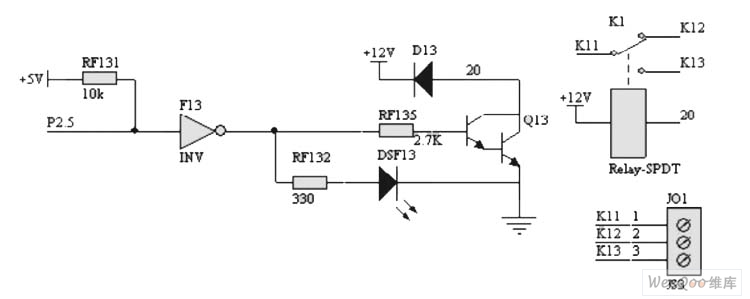
圖8 路燈驅動電路
2.4 MODEM通信接口設計
遠程控制系統(tǒng)的關鍵模塊是通信模塊,基于PSTN 遠程系統(tǒng)的關鍵則是調制解調器(MODEM)通信接口模塊。
系統(tǒng)采用上、下位主從結構設計,上位機為主叫方,下位機為被叫方。上位機以定時循檢或隨即抽檢兩種方式獲取各下位機采集到的數(shù)據(jù)。定時循檢:系統(tǒng)每隔十分鐘(時間可隨意設定)對各個下位機控制器進行電壓、電流數(shù)據(jù)采集,并把該數(shù)據(jù)存儲到上位機中。隨即抽檢通過微機鍵盤或鼠標操作可隨時檢測各個下位機控制器的運行數(shù)據(jù),并能通過指令改變下位機控制器的運行狀態(tài)。MODEM通信接口電路設計如圖9 所示。從圖中可知,RS-232 的接收端與連MODEM的DB9 的第2 腳相連,發(fā)送端與DB9 的第3腳相連,實現(xiàn)“三線式”遠程通信。在MODEM的接口電路設計中,為了防止MODEM可能無法掛機而無法響應微處理器傳來的復位命令。引入 MODEM電源控制電路,當下位機每次響應呼叫并正確發(fā)送數(shù)據(jù)后,由程序控制MODEM端口改變9012 三極管的狀態(tài),完成MODEM的陰陽極同時開關控制。由于調制解調器的供電功率一般在9W以下,因此采用OMROM G5V-2 小型繼電器,該繼電器可靠性高,工作電壓為5V,與單片機系統(tǒng)接口簡單。
MODEM 通信接口電路
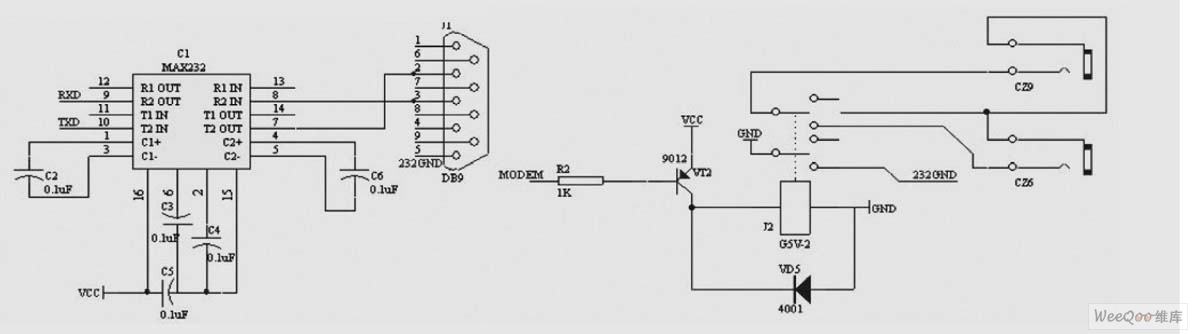
圖9 MODEM 通信接口電路
3 系統(tǒng)軟件設計
在編寫系統(tǒng)軟件時, 應當對整個軟件流程進行清晰的描述, 以便在進行程序編寫時有很明晰的框架接口,以使得軟件編程高效化, 維護規(guī)范化, 以及最大化的可擴展性。對于本系統(tǒng)的軟件的被控對象有以下幾個:
對于外部對象:1)時鐘電路;2)外部中斷;3)AD 芯片轉換處理;4)顯示與鍵盤操作。對于內部操作:1)串行口通信事務的處理;2)輸出電路的處理。
對受控對象進行分析, 就可以劃分出兩類基本流程,一種是可預測的基本事務流程:從上電開始的初始化→時鐘數(shù)據(jù)讀取→對基本事務的處理→顯示處理→循環(huán)等待外部中斷。第二種是不可預測的中斷事務處理:1)來自于鍵盤的中斷事務;2)來自于串行口的中斷事務;對于中斷事務的處理是不具有完全可預測的但是應當是有規(guī)律并且是完全可控的。在基本事務流程中,中斷事務的處理所占的CPU 時間應當是很少的一個部分,并且各個中斷之間的同時發(fā)生的概率不能太大。按照上述分析,利用KEILCX51 所開發(fā)智能路燈控制器的主程序流程如圖10 所示。
主程序流程圖

圖1 0 主程序流程圖
4 結束語
基于公用電話網(wǎng)(PSTN)的智能路燈控制器的技術突破點在于, 利用測試技術、單片機技術、公用電話網(wǎng)通信技術實現(xiàn)對城市路燈運行狀態(tài)的遠程智能控制。在微處理器選擇上采用AT89S8252 單片機,內部含有的看門狗定時器(WDT),能滿足系統(tǒng)無人職守條件下自恢復運行和監(jiān)視運行狀態(tài)的要求,工作性能可靠。智能路燈控制器使用方便,制造成本合理,維護較容易。在試驗條件下, 對于智能路燈控制器的各項測試都得到了滿意的結果, 為其進一步的推廣與應用提供了有利參考。


