
【導讀】在持之以恒的實現高通道密度的努力中,許多系統設計師在尋找使用較少電路板面積,但仍能達到嚴格性能標準的數據采集解決方案。ADI直面這些挑戰,推出首個μModule®數據采集系統系列——ADAQ7980和ADAQ7988。ADAQ798x系列將常見信號處理和調理模塊集成到系統化封裝(SiP)設計中,支持高通道密度,可簡化設計過程,并提供出色的性能。
如何使用集靈活性和高集成度于一身的全能ADC—— μModule數據采集系統ADAQ798x系列呢?ADI工程師為此撰寫了6篇博客,目的是幫助系統您充分利用ADAQ798x系列的靈活前端,并說明它可以如何配置以適應不同應用。
今天,我們先來看看該系列博客的前兩篇:
為何要配置ADC驅動器?
ADC驅動器用于調理輸入信號,并充當信號源與SAR ADC開關電容輸入之間的低阻抗緩沖器。ADAQ798x的ADC驅動器采用“兩全其美”的辦法,不僅具備信號鏈集成優勢,而且提供設計靈活性,支持很多不同的應用。
ADAQ798x中集成ADC驅動器可減少電路板面積,免除(有時令人畏懼的)選擇合適放大器的任務。但是,ADC驅動器配置仍很靈活,因為其輸入和輸出直接路由到器件上的引腳,允許增加外部無源元件實現增益、濾波等。使得ADAQ798x能夠支持多精密應用中的信號幅度和帶寬。
我們將在后續的內容中討論ADAQ798x的幾種常見ADC驅動器配置方案。但在具體了解這些配置的詳情之前,讓我們明確許多應用關于ADC驅動器的一些常見設計考慮。
輸入電壓范圍
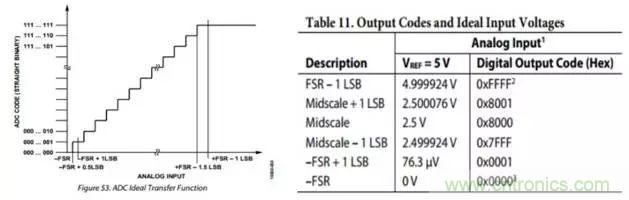
ADAQ798x集成ADC將0 V至VREF的單極性單端信號轉換成16位結果。VREF為基準電壓,其是在外部產生,可在2.4 V至5.1 V范圍內設置。必須配置ADC驅動器以轉換輸入源的輸出范圍,使其適合集成ADC的輸入范圍。
ADAQ7980/ADAQ7988數據手冊給出了ADC驅動器在單位增益配置下的性能,其中IN+引腳的電壓輸入為0 V至VREF。這種配置是最簡單的設計(僅需要將IN-與AMP_OUT引腳短接起來?。?,可實現最佳噪聲性能和功耗,但并非總是可行,因為很多傳感器和信號源不符合ADC的輸入范圍。
例如,工業應用常常涉及幅度高達20 VPP的雙極性信號!幸運的是,只要增加幾個無源元件,便可實現增益、衰減、單極性到雙極性轉換和有源濾波,使信號鏈可能無需使用其他放大器。
注意事項
在未來的文章中,隨著對配置方案的深入探索,我們需要牢記一些關鍵設計注意事項。例子包括:
- 功耗
- 系統噪聲
- 大信號和小信號帶寬
- 建立特性
- 失真
- 失調誤差
- 增益誤差
每種應用對每個參數有不同的要求,但所有參數皆受ADC驅動器配置和所用元件影響。例如,使用大值電阻通常會降低功耗并提高輸入阻抗,但會增加系統噪聲、失真、失調和增益誤差。我們將在未來的文章中考察與具體配置相關的各個參數。
如何與小于ADC輸入范圍的單極性輸入源接口?
正如上述所說,ADAQ798x集成ADC驅動器的多種常見且有用的配置方案,如何進行設計,以及需要注意什么。接下來我們討論下如何使用常見的同相配置來讓ADAQ798x與小于ADC輸入范圍(0 V至VREF)的單極性輸入源接口。
同相配置
ADC轉換0 V和VREF之間的輸入,意味著ADC驅動器的輸出范圍也必須是0 V到VREF,系統才能利用ADAQ798x提供的全部216個碼。ADAQ798x集成ADC驅動器可提供增益來使幅度較小的信號得到必要的擴大。
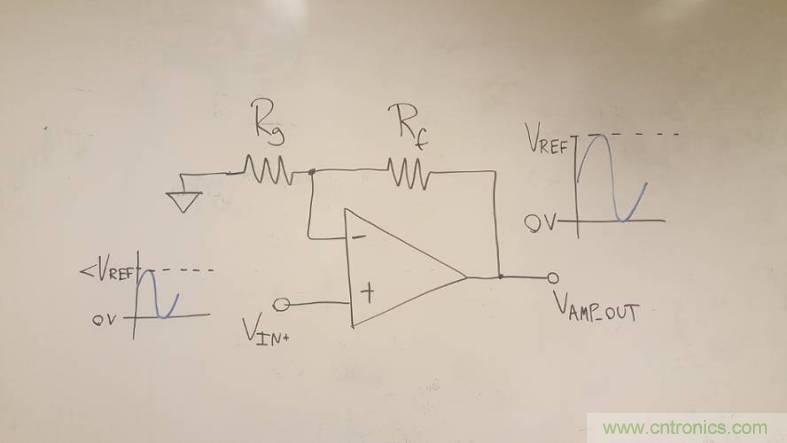
這就要用到同相配置。此配置為單極性信號提供增益,提供高輸入阻抗,只需增加兩個電阻。
很多系統設計師已經知道同相配置的工作原理,但我們將結合ADAQ798x予以討論,并了解該配置如何影響系統的關鍵性能參數,包括系統噪聲、信噪比(SNR)和總諧波失真(THD)。
第一、給定應用的輸入范圍和基準電壓
如何選擇電阻Rf和Rg?ADC驅動器輸出端的電壓(vAMP_OUT)為:
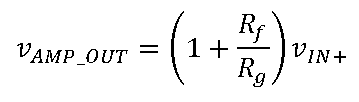
vAMP_OUT在0 V和VREF之間,Rf和Rg之比很容易根據應用的輸入范圍(vIN+)進行計算:
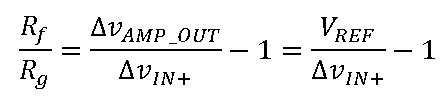
算出Rf和Rg之比后,必須選擇其具體值。這些電阻的“恰當”值取決于應用,并且必須考慮系統噪聲性能與功耗、失真、放大器穩定性的平衡。Rf值越低,則噪聲越低,但從ADC驅動器輸出端吸取的電流會增大(功耗提高)。使用較大Rf值可限制此功耗,但會增加系統噪聲并可能造成不穩定問題。
第二、電阻產生的噪聲量與其阻值成正比
較大電阻會貢獻較多噪聲,并且可能影響系統的本底噪聲和交流性能規格(比如SNR)。系統總噪聲為電路中各噪聲源的和方根,包括電阻、ADC驅動器和ADC本身的噪聲:
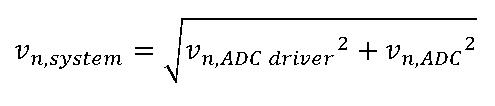
其中,vn,system為系統有效值本底噪聲,vn,ADC driver為ADC驅動器電路的總噪聲(包括外部電阻),vn,ADC為ADC本底噪聲規格。
ADAQ7980/ADAQ7988數據手冊中闡述了如何計算vn,ADC driver(參見噪聲考慮和信號建立部分);對于5 V基準電壓,算出vn,ADC為44.4 μVRMS。參考電路《庫隔離、2通道、16位、500 kSPS同步采樣 信號鏈,集成數據采集系統》中還說明了如何根據系統總噪聲計算系統的預期SNR(參見系統噪聲分析部分)。為了簡潔起見,我們不會在這里重復那些計算,但會再舉一個例子。
舉個栗子
我們來考慮這樣一種情況:ADAQ7980需要與一個輸出范圍為0 V至2.5 V的傳感器直接接口,采用5 V基準電壓。由于傳感器的輸出幅度等于ADC輸入范圍的一半,所以ADC驅動器的增益應設置為2。這要求Rf等于Rg,但Rf的選擇有一定的靈活性。
首先來看看不同的Rf(和Rg)值對系統本底噪聲和相應的預期SNR有何影響:
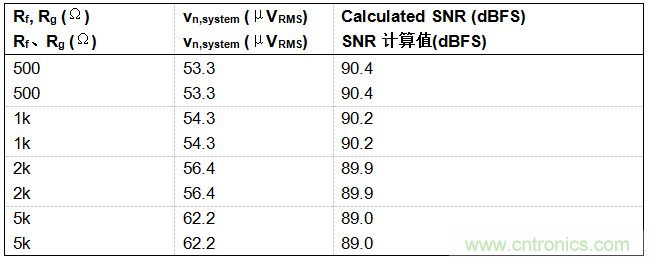
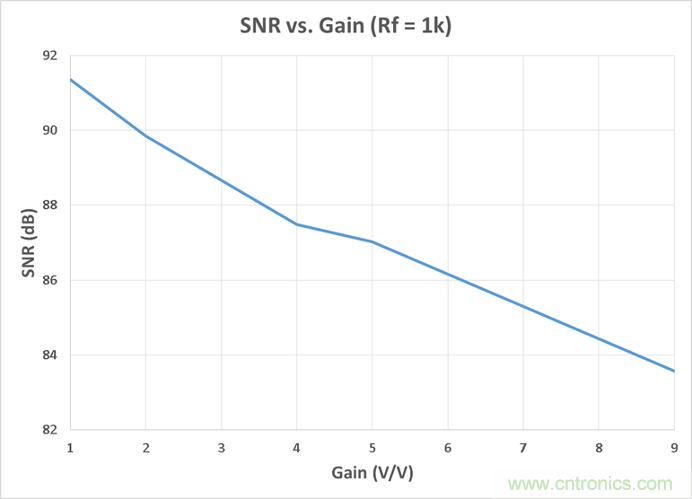
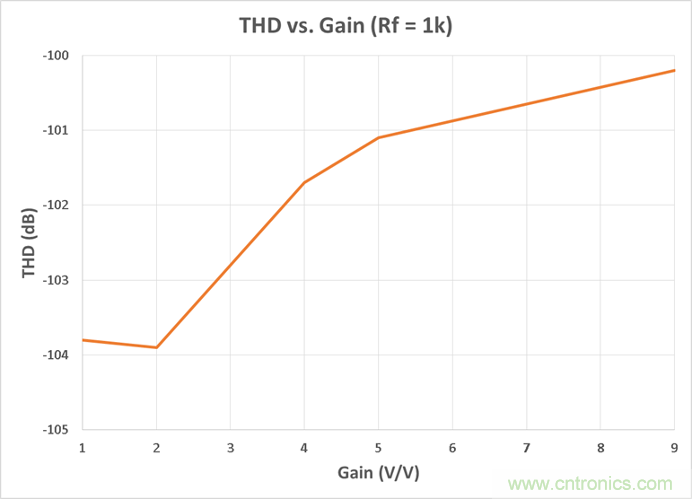
可以看到,使用較高的Rf和Rg值時,系統噪聲會提高,SNR會下降。提高增益也會降低SNR性能,因為它會提高ADC驅動器輸入電壓噪聲和Rg貢獻的有效噪聲。下面的曲線顯示了不同增益下實測的SNR和THD(總諧波失真)結果,Rf = 1 kΩ(輸入頻率 = 10 kHz)。
不過,選擇較小電阻的缺點之一是ADC驅動器需要通過反饋網絡輸送更多電流(因而功耗增加)。通過Rf和Rg的瞬時電流等于vAMP_OUT除以Rf與Rg之和。此電流會加到系統總功耗上,在低功耗應用中應予以限制。
結語
這種配置的一個優勢是其輸入阻抗非常大,因為信號源直接連到ADC驅動器的同相節點。這對輸出阻抗非常大的信號源特別有用。我們會看到,對于其他配置,情況并非總是如此。
雖然同相配置可提供增益,但也有一些實際限制。首先,正如《模擬對話》文章《精密SAR模數轉換器的前端放大器和RC濾波器設計》所述,ADC驅動器必須維持一定的大(和?。┬盘枎捯詽M足ADC的正向(和反向)建立要求。帶寬與閉環增益成反比。系統噪聲也會隨著增益提高而提高,在某一點時,性能會降低太多,只有進行相當程度的濾波才可行(我們將在后續連載中討論)。
另外,對于要求極低失調和增益誤差與漂移的應用,務必使用具有適當容差和TCR規格的精密電阻。如可能,應使用指定了各電阻間阻值和TCR的跟蹤精度的匹配電阻網絡(例如LT5400系列)。參考電路《庫隔離、2通道、16位、500 kSPS同步采樣 信號鏈,集成數據采集系統》 詳細探討了這一概念。還應注意,ADC驅動器的輸入偏置電流會流經Rf和Rg,這會引起系統的電壓失調。可在ADC驅動器的同相節點與輸入源之間放置一個電阻以抵消此類失調,但應注意,此電阻也會增加系統噪聲!
下期我們將討論全能DAQ ADAQ798x的同相求和配置以及支持衰減的同相求和配置,敬請期待!
本文轉載自亞德諾半導體。
推薦閱讀:


