

【導讀】危險品處理機器人是用于危險彈藥夾持、拔出、搬運和放置作業,并可攜帶和放置的裝置。本文從機械手的結構形式出發,詳細介紹了危險品處理機器人的作用,著重強調了控制系統和硬件設計的實現。經過測量得出機械手的和項技術指標。
該項目的完成將解決長期困擾我軍的事故炮彈、戰爭遺留彈等危險彈藥安全處理問題。機械手是危險品處理機器人操作過程中直接與彈藥接觸的重要部件,主要用于執行對危險彈藥的夾持、拆除、搬運和放置作業, 機械手工作的穩定性直接決定著彈藥處理的成功率,因此機械手的設計至關重要。
機械手的三塊控制器的控制芯片都為2407DSP,雖然三塊控制器實現的功能不同,但在硬件電路設計時按照DSP管腳的功能,設計外圍電路如下:
PWM 管腳:
DSP 的每個事件管理器都有與比較單元相關的PWM 電路,能夠產生六路帶可編程死區和輸出極性的PWM 輸出,但是都是成對輸出的,對于本控制器需要的獨立的輸出,每個事件管理器只有3 路,一個DSP 有兩個事件管理器,可以獨立的輸出6 路PWM 波。液壓控制器需要6 路PWM 波驅動電業比例閥,而伺服電機控制器需要4 路0-5V 的加速器信號調節電機轉速,在設計電路時將這兩種電路設計在一起,并制成印刷電路板,焊板時按每板的功能焊接即可,液壓控制器需要輸出PWM 波形,芯片用LM393 做比較器,此時電阻R19 和電容C71 不焊即可,但要有R21上拉電阻,R17 和R18 將2 腳電壓分在1.7V 左右比較合適。伺服控制器需要輸出0-5V 電壓芯片用LM2904 做運放用,焊電阻R19 和電容C17不用MOS 管、R21 和外接電源,也不用焊R17,直接將DSP 輸出0-3.3V 電壓放大到0-5V 輸出。PWM/電壓輸出電路圖見圖1:
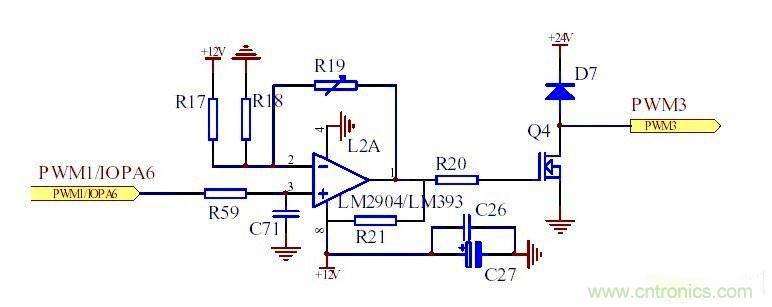
圖1 PWM/電壓輸出電路
IO 口:DSP 的數字I/O 口模塊具有控制專用I/O 和復用引腳的功能,可以輸出輸入高低電平信號,根據其功能將其設計成開關量輸出,輸入,并用其控制繼電器,作為控的開關。開關量輸入只要用電阻分壓即可,開關量輸出使用光耦隔離,本設計用的光耦PC817,比較適合DSP 使用。當DSP 輸出高電平時繼電器吸合,CNETA1 和CNETA2 兩腳導通繼電器電路圖見圖2:
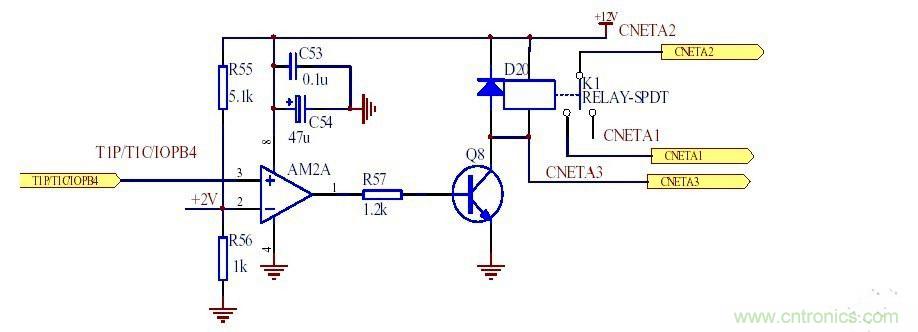
圖2 繼電器電路圖
QEP 電路:DSP 的每個時間管理器都有一個正交編碼器脈沖(QEP)電路。當QEP電路被使能時可以對CAP1/QEP1 和CAP2/QEP2(對于EVA 模塊)引腳上的正交編碼輸入脈沖進行解碼和計數。正交編碼脈沖電路可用于連接光電編碼器以獲得旋轉機械的位置和速率。伺服電機控制器需要使用QEP 電路,由于一個伺服電機控制器需要控制4 臺伺服電機,所以碼盤信號使用74153 芯片選擇輸入,同時碼盤的每路信號都有正負兩根線通過運放放大后再到74153 選擇后輸入DSP,碼盤選擇電路見圖3:
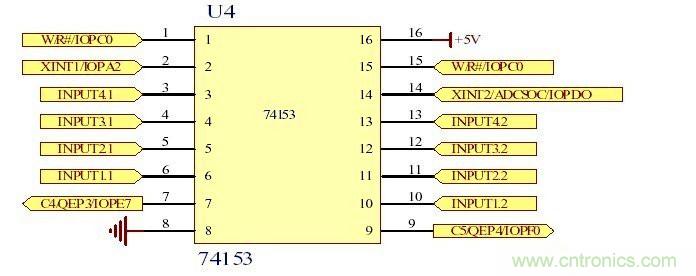
圖3 碼盤選擇電路
其中W/R/IOPC0 為使能信號,XINT1/IOPA2 和XINT2/ADCSOC/IOPDO 構成選擇信號,74153 通過選擇信號的選擇碼選擇一對信號從7 腳和9 腳輸出給DSP。其他硬件電路設計包括電源、串口、CAN 總線和DSP 外圍接線等都是典型的設計。相關閱讀:
家庭監護機器人有突破!語音識別系統“箭在弦上”
水中機器人的崛起:仿生機器魚的系統設計
焊接不用人了!移動焊接機器人電路設計


