

【導(dǎo)讀】得益于手持設(shè)備等的強勁需求,預(yù)計2015年MEMS陀螺儀市場將達到11億美元。高性能及低成本等諸多優(yōu)勢使MEMS陀螺儀有望取代加速度計,成為移動MEMS和消費電子領(lǐng)域的盈利冠軍。而對于這位市場新寵,你又了解多少呢?

多軸MEMS陀螺儀結(jié)構(gòu)大幅縮小,單封裝集成數(shù)字接口,占板面積僅幾平方毫米,低廉的價格被大多數(shù)客戶接受,這些優(yōu)勢促使MEMS陀螺儀滲透到手持設(shè)備市場。MEMS陀螺儀讓便攜設(shè)備能夠增加很多令人驚喜的特色功能,其中包括提高相機性能的圖像穩(wěn)定功能;增加更多功能并提高易用性的用戶界面;令人興奮的游戲娛樂功能。MEMS陀螺儀還將用于需要高靈敏度、低噪聲、低漂移的航位推測和GPS輔助導(dǎo)航。
本文討論如何根據(jù)角速率和角位移測量結(jié)果,從一個MEMS陀螺儀快速獲取有價值的信息。 第一部分論述MEMS陀螺儀的工作原理和目標(biāo)應(yīng)用;第二部分介紹模擬輸出或數(shù)字輸出MEMS陀螺儀的主要參數(shù);第三部分介紹MEMS陀螺儀的實用校準(zhǔn)技巧;第四部分通過4個示例,從角位移的角度說明如何測試MEMS陀螺儀的性能。
一.MEMS陀螺儀技術(shù)概述
MEMS陀螺儀在高性能和低功耗方面取得了巨大的進步。這些器件可實現(xiàn)量產(chǎn)、價格低廉、尺寸緊湊,被廣泛應(yīng)用于消費電子產(chǎn)品中。
1. MEMS陀螺儀工作原理
MEMS陀螺儀利用科里奧效應(yīng)測量運動物體的角速率,如圖1所示。

圖1:科里奧效應(yīng)
根據(jù)科里奧效應(yīng),當(dāng)一個物體(m)沿V方向運動且施加角旋轉(zhuǎn)速率Ω時,該物體將受到一個黃色箭頭方向的力。然后,從一個電容感應(yīng)結(jié)構(gòu)可以測到科里奧效應(yīng)最終產(chǎn)生的物理位移。
目前市面上的MEMS陀螺儀多數(shù)采用一種調(diào)音叉結(jié)構(gòu)。這種結(jié)構(gòu)由兩個振動并不斷地做反向運動的物體組成,如圖2所示。當(dāng)施加角速率時,每個物體上的科里奧效應(yīng)產(chǎn)生相反方向的力,從而引起電容變化。電容差值與角速率Ω成正比,如果是模擬陀螺儀,電容差值轉(zhuǎn)換成電壓輸出信號;如果是數(shù)字陀螺儀,則轉(zhuǎn)換成最低有效位。
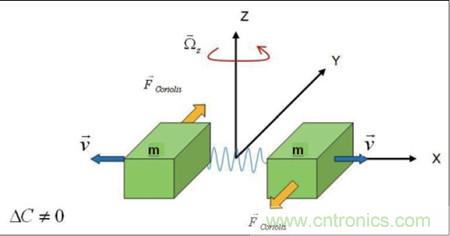
圖2:當(dāng)施加角速率時
如果在兩個物體上施加線性加速度,這兩個物體則向同一方向運動。因此,不會檢測到電容變化。陀螺儀將輸出零速率輸出值或最低有效位,表示MEMS陀螺儀對傾斜、撞擊或振動等線性加速度不敏感。
[page]
2.MEMS陀螺儀應(yīng)用
下面是MEMS陀螺儀的目標(biāo)應(yīng)用:.
● MEMS陀螺儀能夠測量角速率。數(shù)碼相機使用陀螺儀檢測人手的旋轉(zhuǎn)運動,能夠?qū)D像起到穩(wěn)定的作用。在汽車上,偏航陀螺儀可以開啟電子穩(wěn)定控制(ESC)制動系統(tǒng),防止汽車急轉(zhuǎn)彎時發(fā)生意外事故。當(dāng)汽車出現(xiàn)翻滾狀況時,滾轉(zhuǎn)陀螺儀可以引爆安全氣囊。
● 當(dāng)汽車導(dǎo)航系統(tǒng)無法接收GPS衛(wèi)星信號時,偏航陀螺儀能夠測量汽車的方位,使汽車始終沿電子地圖的規(guī)劃路線行駛,這個功能被稱之為航位推測系統(tǒng)。
● 偏航陀螺儀還能用于室內(nèi)機器人控制。
● 安裝在機器人四肢上的多路慣性測量單元(IMU)能夠跟蹤和監(jiān)測身體運動。
● IMU可用于空中鼠標(biāo)。
● IMU還能用于運動控制式游戲平臺。
● IMU配合磁力計和GPS接收器,可以在手持設(shè)備上執(zhí)行個人導(dǎo)航功能。
二.理解MEMS陀螺儀的主要參數(shù)
● 電源(V):這個參數(shù)規(guī)定了陀螺儀正常工作所需的直流電源電壓范圍。
● 電源電流 (mA):這個參數(shù)規(guī)定了陀螺儀正常工作所消耗的電流大小。
● 睡眠模式電源電流 (mA):這個參數(shù)規(guī)定了陀螺儀在睡眠模式下所消耗的電流大小。
● 關(guān)機模式下的電源電流(μA):這個參數(shù)規(guī)定了當(dāng)陀螺儀電源關(guān)閉時所消耗的電流大小。
● 全量程 (dps):這個參數(shù)規(guī)定了陀螺儀的量程范圍。
● 零速率輸出值(電壓或最低效位):這個參數(shù)規(guī)定了當(dāng)陀螺儀沒有被施加角速率時的零速率輸出信號的數(shù)值。
● 靈敏度 (mV/dps或dps/LSB):這個參數(shù)規(guī)定了在零速率輸出值時1 dps與模擬陀螺儀輸出電壓變化的關(guān)系,用mV/dps表示;數(shù)字陀螺儀的靈敏度(dps/LSB)表示1個最低有效位與dps的關(guān)系。
● 靈敏度變化與溫度關(guān)系(%/°C):這個參數(shù)規(guī)定了當(dāng)溫度偏離25℃室溫時,以℃為單位的靈敏度百分比變化。
● 零速率輸出值變化與溫度關(guān)系(dps/℃):這個參數(shù)規(guī)定了當(dāng)溫度偏離25℃室溫時,以℃為單位的零速率輸出值的變化。
● 非線性 (% FS):這個參數(shù)規(guī)定了陀螺儀輸出與最佳匹配直線之間的最大誤差占全量程(FS) 的百分比。
● 系統(tǒng)帶寬(Hz):這個參數(shù)規(guī)定了角速率信號頻率范圍:從直流到模擬陀螺儀可測量的內(nèi)部帶寬(BW)。
● 速率噪聲密度 (dps/√Hz):這個參數(shù)規(guī)定了能夠從陀螺儀輸出以及BW參數(shù)獲得的模擬陀螺儀和數(shù)字陀螺儀的標(biāo)準(zhǔn)分辨率。
● 自測 (mV or dps):這個功能可用于測試陀螺儀工作是否正常。這個功能的好處是在陀螺儀安裝到印刷電路板后無需旋轉(zhuǎn)印刷電路板即可測試陀螺儀。
三.MEMS陀螺儀校準(zhǔn)
每個陀螺儀在出廠前都經(jīng)過嚴格的性能測試以及靈敏度和零速率輸出值校準(zhǔn)。不過,當(dāng)陀螺儀組裝到印刷電路板后,因為機械或電焊應(yīng)力的影響, 零速率輸出值和靈敏度可能會略微偏離工廠校準(zhǔn)調(diào)試值。對于游戲機和遙控器等應(yīng)用,設(shè)計人員只要用數(shù)據(jù)表中的典型零速率和靈敏度參數(shù),即可把陀螺儀的測量信號轉(zhuǎn)換成角速率。對于要求嚴格的應(yīng)用,設(shè)計人員需要重新校準(zhǔn)陀螺儀的零速率輸出值、靈敏度和以下重要參數(shù):
● 失準(zhǔn) (又稱跨軸靈敏度)
● 線性加速度靈敏度或g-靈敏度
● 長期運行偏差穩(wěn)定性
● 導(dǎo)通-導(dǎo)通偏差穩(wěn)定性
● 長時間工作后偏差和靈敏度漂移
1.消除零速率不穩(wěn)定性
公式1是陀螺儀輸出的表達式。
其中:
Rt (dps)是實際角速率
Rm(LSB)是陀螺儀的測量結(jié)果
R0 (LSB)是零速率輸出值
SC (dps/LSB)是靈敏度
為修正導(dǎo)通-導(dǎo)通偏差不穩(wěn)定性,在陀螺儀上電后,用戶可以采集50~100個輸出數(shù)據(jù)樣本,取這些樣本的平均值作導(dǎo)通零速率輸出值R0 ,假設(shè)該陀螺儀是靜止?fàn)顟B(tài)。
因為溫度變化和測量噪聲,當(dāng)陀螺儀是靜止?fàn)顟B(tài)時,陀螺儀的每次讀數(shù)可能略有不同。設(shè)定一個閾值Rth ,如果陀螺儀測量值的絕對值小于閾值,則使陀螺儀的讀數(shù)歸零,如公式2所示。這個方法將消除零速率噪聲,當(dāng)陀螺儀靜止時,角位移不會累加。
每當(dāng)陀螺儀靜止時,用戶可以采集50~100個陀螺儀數(shù)據(jù),然后取這些樣本的平均值作為零速率輸出值R0。這個方法可以消除零速率運行偏差和微小溫度變化。在零速率采樣后,必須從上面的幾步開始考慮不穩(wěn)定性,因此公式 (1) 變?yōu)椋?br />
因此,下一步就是利用一個參照系統(tǒng)確定公式3中的靈敏度SC的數(shù)值。
應(yīng)該強調(diào)的是,MEMS陀螺儀的靈敏度非常穩(wěn)定,受工作時間和環(huán)境溫度的影響很小,僅上面提到的高靈敏度應(yīng)用才需要校準(zhǔn)過程。
[page]
2.使用角速率測量臺確定靈敏度
因為陀螺儀能夠直接測量角速率,所以角速率測量臺是校準(zhǔn)陀螺儀靈敏度的最佳參考標(biāo)準(zhǔn)。在一個精確角速率測量臺內(nèi)有一個內(nèi)嵌溫度單元。為了確保在校準(zhǔn)陀螺儀過程中角速率測量臺不受環(huán)境振動的影響,角速率測量臺被置于一個振動隔離平臺之上。
把手持設(shè)備置于一個正方體的鋁盒或塑料盒內(nèi),然后把整個系統(tǒng)安裝在角速率測量臺上進行校準(zhǔn)。使角速率測量臺沿順時針和逆時針兩個不同方向旋轉(zhuǎn)。如果被校準(zhǔn)的是多軸陀螺儀,把方正形測試盒置于角速率測量臺上的不同方位,然后重復(fù)上面的校準(zhǔn)過程。收集完陀螺儀在不同狀況下的原始數(shù)據(jù)后,即可確定零速率輸出值、靈敏度、失準(zhǔn)矩陣和g靈敏度值。
校準(zhǔn)陀螺儀還可以選用步進電機旋轉(zhuǎn)測量臺,用一臺個人電腦控制步進電機旋轉(zhuǎn)測量臺。
3.使用數(shù)字羅盤確定靈敏度
如果沒有角速率測量臺,可以使用數(shù)字羅盤代替角速率測量臺。
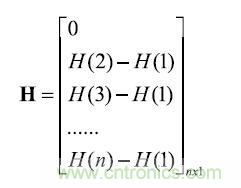
在校準(zhǔn)陀螺儀前,需要校準(zhǔn)數(shù)字羅盤的傾斜度,然后將其置于周圍沒有干擾磁場的平臺上。合并在固定采樣間隔內(nèi)采集的數(shù)字羅盤相對方向信息和陀螺儀輸出數(shù)據(jù),按公式4校準(zhǔn)陀螺儀的靈敏度。

其中:
N:采樣數(shù)量
h:采樣間隔
H(1) :電子羅盤初始方向
H(n):羅盤在第n個樣本時的方向
SC (dps/LSB):陀螺儀靈敏度
ΔR(i) :在去除零速率輸出值和死區(qū)后,在第i個樣本的陀螺儀
輸出數(shù)據(jù)公式4可改寫為:
其中:

因此, 我們可以從公式5得到利用最小平方方法計算的SC。
圖3描述了以度為單位的羅盤相對方向的變化,以及合并數(shù)據(jù)后的陀螺儀角位移。通過觀察圖3不難看出,羅盤相對方向變化(紅線)與陀螺儀位移(藍線)有非常好的線性關(guān)系。通過公式6,我們可以求得陀螺儀靈敏度校準(zhǔn)參數(shù)。
[page]
4.MEMS陀螺儀測試
在完成陀螺儀校準(zhǔn)后,最后一步是測試陀螺儀的性能,了解如何從陀螺儀原始數(shù)據(jù)中獲取有價值的角位移信息。
測試1:當(dāng)陀螺儀靜止時
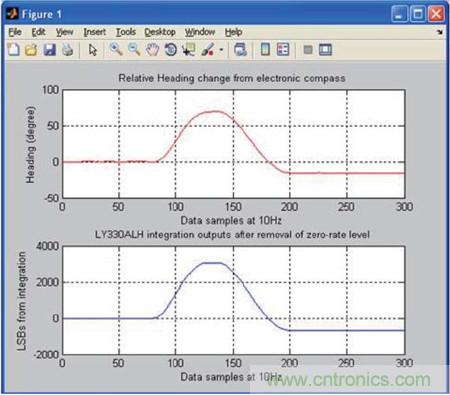
圖3:羅盤相對方向和陀螺儀角位移
當(dāng)陀螺儀沒有旋轉(zhuǎn)時,陀螺儀輸出原始數(shù)據(jù)應(yīng)在零速率輸出值附近,且數(shù)據(jù)整合后陀螺儀方向應(yīng)始終為0°。
測試2:當(dāng)陀螺儀順時針整圈旋轉(zhuǎn)時
在采集30-~50個陀螺儀原始數(shù)據(jù)樣本以修正零速率輸出值偏差后, 使陀螺儀順時針旋轉(zhuǎn)90°,再繼續(xù)旋轉(zhuǎn)90°,直到旋轉(zhuǎn)360°。見圖4。

圖4:整圈順時針旋轉(zhuǎn)的單軸陀螺儀
測試3:當(dāng)陀螺儀逆時針整圈旋轉(zhuǎn)時
在采集30~50個陀螺儀原始數(shù)據(jù)樣本以修正零速率輸出值偏差后,使陀螺儀逆時針旋轉(zhuǎn)90°,再旋轉(zhuǎn)90°,直到旋轉(zhuǎn)360°。這種情況下,每次旋轉(zhuǎn)90°時,角速率都不相同,但是陀螺儀方向測量精確歸零,誤差大約僅1.6°。
5.結(jié)論
隨著MEMS技術(shù)和制程的進步,MEMS陀螺儀的成本不斷降低,性能不斷提高,功耗越來越低,尺寸越來越小,能夠讓手持設(shè)備增加更多新功能。
MEMS陀螺儀是在特性測試和質(zhì)量檢測過程中完成校準(zhǔn)。大多數(shù)應(yīng)用沒有必要校準(zhǔn)陀螺儀,不過,對于復(fù)雜的要求嚴格的應(yīng)用(如導(dǎo)航和航位推測),在組裝到印刷電路板后投入量產(chǎn)前,需重新校準(zhǔn)零速率輸出值和靈敏度。
相關(guān)閱讀:
詳解MEMS陀螺儀的工作原理
http://www.77uud.com/sensor-art/80018717
MEMS陀螺儀:數(shù)字化控制性能更優(yōu)
http://www.77uud.com/gptech-art/80021025
加速度計整合陀螺儀 整合使用提升應(yīng)用價值
http://www.77uud.com/sensor-art/80018480

