

- 數碼相機的防抖技術及其設計
- 電子防抖,鏡頭防抖(也稱為光學防抖),CCD防抖
- 采用MEMS陀螺儀自動聚焦功能
數碼相機的防手抖技術一般分為三類:電子防抖,鏡頭防抖(也稱為光學防抖),CCD防抖。電子防抖一種是提高感光度(HighISO),從而提高快門速度(減低曝光時間),使快門速度超過安全快門來避免抖動。這種方法變化了快門速度,不僅能改善相機方面的抖動,也能對移動的物體進行更好的捕捉,但由于提高了感光度,由于元器件的限制,相應的圖片噪聲會提高,影響圖片的質量。表一為國際標準組織定義的條件系統,在感光度(ISO)提高一個級數,快門時間就可以減少一半。電子防抖另一種是對圖像進行分析,依據抖動對邊緣進行處理,屬于后端處理,對圖片幫助不是很大。
鏡頭防抖是通過鏡片的移動來補償相機的抖動,它由傳感器,微處理器,補償鏡片控制組,驅動控制部分組成,依靠補償鏡片的移動來校正手抖引起的光線偏移,如圖1,鏡頭不同,設計上有差異,但基本上都是透過補償鏡片組來補償。CCD防抖是通過感光元器件CCD(或CMOS)放在一個可移動支架上來,通過傳感器感知相機的抖動,由微處理器計算相應的移動量,由驅動部分對CCD移動,以達到防抖目的。目前,一般相機的防抖(CCD防抖或光學防抖)不是無限可以補償,一般為2~~3級,按表一來說,假設安全快門1/125,2級,快門速度1/30,快于此速度,容易拍清晰的照片,由此類推,3級,快門速度為1/15。表2為三種防抖方式的比對表。
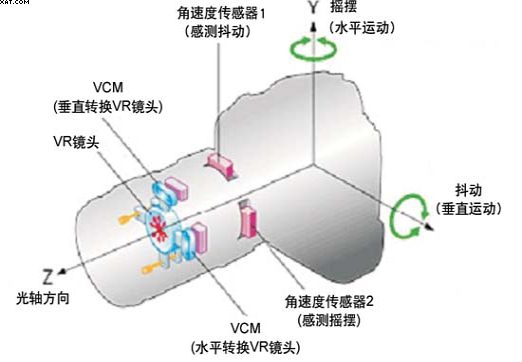
圖1光學防抖結構示意圖

圖2CCD防抖示意圖
表1攝影組合級數

表2防抖方式比對表[page]

MEMS陀螺儀(Gyro),微機電系統(MEMS)技術的飛速發展已經允許制造商在微型芯片上制造出完整的陀螺裝置。MEMS陀螺儀背后的物理現象就是科里奧利效應(Coriolis)。如圖3,微型塊在旋轉面上(ω),微型塊m將前后振動,因此產生相同頻率的垂直科里奧利力。這些力的幅度等于±2ωvm,并直接正比于整個系統的角速度ω。這些力將導致圖3所示部件的物體從一邊推向另一邊,這些位移可以被檢測為電容的變化。此時陀螺儀(Gyro)所需的就是用相關電路去檢測電容的振蕩,并將它轉換為電壓,再經整流后輸出直流電壓。這種電路的目的是將旋轉速度轉換為電壓。MEMS陀螺儀(Gyro)產品最主要特色是整合了MEMS機械設計和制造、混合信號ASIC設計,以及晶圓級封裝等技術,開發出兼具小尺寸、低成本與高效能的陀螺儀產品。
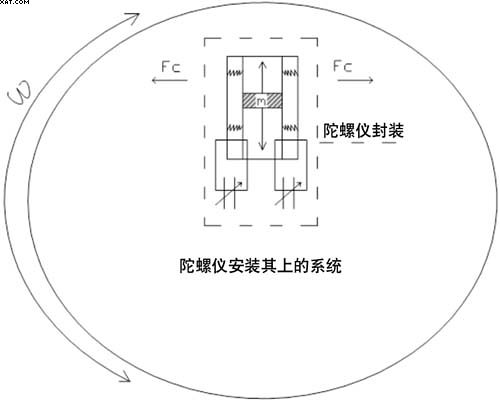
圖3MEMS陀螺儀的實現
由圖2看出,在3D圖面上,Z軸有自動聚焦功能,Z軸移動對成像基本沒有影響,有影響是在X軸(PITCH)與Y軸(YAW)。圖4為在晚上拍照,無防手抖與有CCD防手抖的結果。圖5為CCD防抖系統框架,CCD防抖是在鏡頭上增加CCD支架,利用步進馬達對X軸,Y軸的驅動,使CCD移動來補償CCD的抖動。MEMS陀螺儀選用要有X,Y軸Gyro芯片,內部含放大,低通,高通濾波,這樣可以大大減少相機的尺寸。Gyro信號連DSP的ADport,DSP的AD是10bit,滿足設計要求。資料運算用相機本身的DSP處理,可以減少一微處理器(Micro),降低成本。DSP對Gyro傳來的ω信息進行運算,計算補償量,通過馬達驅動電路驅動X,Y移動來達到補償的目的。X軸,Y軸的PI信號是Lens反饋DSP信息來校正CCD與Lens中心重合,避免補償過程超出Lens設計的補償范圍。
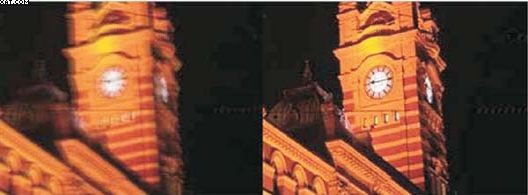
圖4左邊照片為沒有打開防手抖,右邊打開防手抖
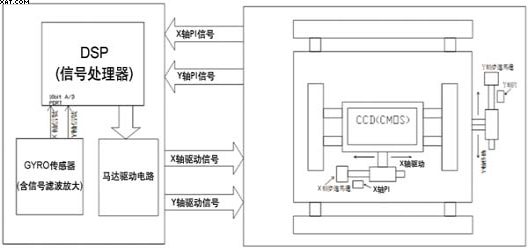
圖5CCD防抖系統方塊圖
實驗證明,一般人手持相機拍照時手抖頻率0~20Hz(資料來源:日文版數字攝影雜志2006/12),DSP對GYRO取樣頻率設為500~1KHz能夠滿足系統的要求。圖5為抖動的位移示意圖,黑色為原來的位置,紅色為偏移位置。
按Lens的spec可知步進馬達每相的移動量(如1.44um)。由公式3可知GYRO感知角速度,就可以計算出CCD的偏移量。
d=f*sinθ------(1)
Whenθ<20°d=f*θ
θ=∫ωdt-----(2)
θ=Σωi*dt
→d=f*Σωi*dt-----(3)
d:偏移量f:焦距ω:角速度

圖6抖動光路的變化
CCD的防抖動系統采用PID自動控制系統(PID就是比例微積分調節),如圖7,P(比例)控制是Gyro偵測的抖動按比例移動CCD,I(積分)控制是調節對時間積分誤差,D(微分)是抑制誤差產生的超前,如低頻Powernoise補償。通過調整PID參數,使系統穩定可靠運行,達到設計的目的。同時也要考慮部件對系統的影響,如Powernoise對Gyrosense造成的測試誤差,步進馬達能否達到要求的1000pps,Gyro的低通,高通濾波器等等。
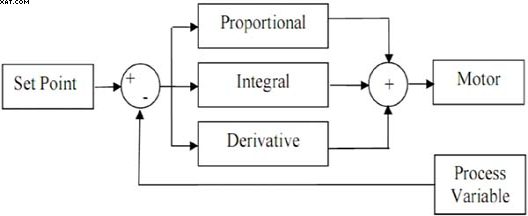
圖7PID方塊圖
CCD防抖技術可以克服手抖引起的圖像模糊,但不是萬能,目前業界補償的標準也就是安全快門的2~3級,遇到長焦或快門時間過長,超過補償極限時,帶三腳架拍照才是最有效。


