
中心議題:
- 抖動是邊沿較本應位置的偏差
- 應從整體BER角度了解系統(tǒng)的運行方式
- 串擾問題為實現(xiàn)性能目標
解決方案:
- BUJ測量解決方案
串行數(shù)據(jù)標準持續(xù)迅猛發(fā)展,大幅度改善了PC和服務器系統(tǒng)的性能。測試這些更高速的標準、找到抖動證據(jù),對長期穩(wěn)定性及在設計中實現(xiàn)優(yōu)異的誤碼率(BER)目標至關重要。為高效進行分析,首先要選擇適當?shù)膬x器,很好地了解儀器噪聲、上升時間及三階諧波性能、四階諧波性能、五階諧波性能等因素。
但還不僅僅是測量這么簡單,合適的儀器必需與適當?shù)姆治龉ぞ吲涮资褂谩T跍y試8 Gb/s以上的串行數(shù)據(jù)速率時,還要考慮其它因素,如抖動分離和去嵌/嵌入。在本文中,我們將重點介紹存在串擾時的一種新的抖動分離方法,隨著通路數(shù)量提高,以提升計算系統(tǒng)吞吐量,串擾問題正越來越多。
所有采用電壓跳變表示定時信息的電氣系統(tǒng)都有定時抖動。在歷史上,電氣系統(tǒng)通過采用相對較低的信令速率來減緩定時抖動(或簡稱為抖動)的負面影響。隨著數(shù)據(jù)速率攀升到8 Gb/sec以上,抖動占信令間隔的比重已經(jīng)很大,了解抖動類型和抖動來源對成功部署高速串行技術非常關鍵。
簡單地說,抖動是邊沿與本應位置相比的偏差,如圖1所示。根據(jù)ITU的定義,抖動 是"數(shù)字信號在有效時點較理想時間位置的短期變化".
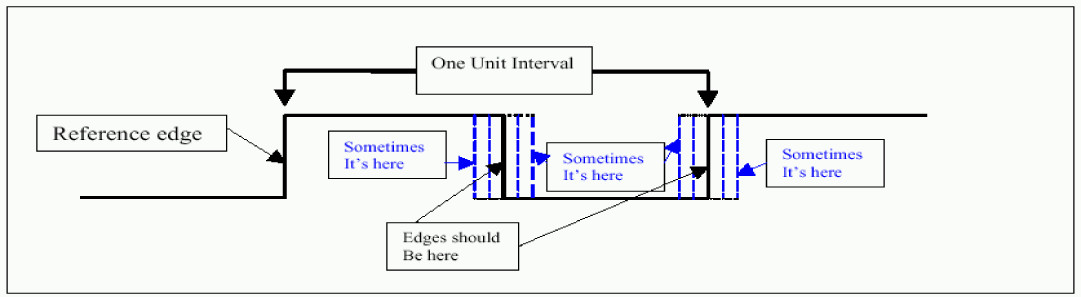
圖1 抖動是邊沿較本應位置的偏差
可以通過多種方式測量單個波形上的抖動,包括周期性抖動、周期間抖動和時間間隔誤差(TIE),設計通常決定著哪種指標合適。在獨立式振蕩器中,信號是時鐘,可能會跳頻或掃頻。這里,周期性抖動是合適的指標。在串行數(shù)據(jù)流的發(fā)射機中,信號是數(shù)據(jù)流,ISI(碼間干擾)是關鍵問題。這里,TIE抖動是合適的指標。
處理抖動問題的工程師有大量的儀器可以選擇,每種儀器都有獨特的優(yōu)勢和劣勢:
· 實時數(shù)字存儲示波器(DSO)恢復整個波形,可以測量任何指標,可以用于TIE、周期到周期抖動和周期性抖動測量。但它在頻率(或位速率)、解析頻譜、小的抖動及多電平調(diào)制方面有局限性 .
· BER測試儀(BERT)特別適合TIE抖動,特別是TJ或總抖動,這是TIE的一種形式。BERT的優(yōu)勢是它計數(shù)每個比特,但測試執(zhí)行起來耗費時間較長。
· 實時頻譜分析儀(RTSA)可以用于周期間抖動測量和周期性抖動測量,支持移動設備的復雜調(diào)制,查看時鐘、PLL,了解其動態(tài)性能。其局限性包括跨度(低于100 MHz)和帶寬信號,具有大的調(diào)制頻譜。
· 等效時間采樣示波器提供了最佳的帶寬,可以用于串行數(shù)據(jù)的所有抖動測量。目前,這些示波器是唯一支持噪聲分析和BER眼圖的儀器。其局限性是沒有實時捕獲功能,只能用于重復的碼型,某些抖動頻譜有假信號。
人們經(jīng)常提出的一個問題是如果我們最終只關心BER,那么為什么還要擔心抖動。這是因為眼圖(寬度)閉上得太多時會導致誤差。抖動和噪聲分析工具可以迅速預測和分析BER中的問題。最終,一切都歸結(jié)于誤差,而消除設計中的這些誤差要求了解抖動過高的一個或多個原因。
首先應從整體BER角度了解系統(tǒng)的運行方式。示波器使用眼圖和統(tǒng)計分析,生成浴缸圖。之所以叫浴缸圖,是因為在極限變化時,得到的圖形形狀像浴缸。在使用BERT儀器時,每個位的具體數(shù)量會得到一個抖動峰值圖。如圖2所示,左面來自BERT的抖動峰值與右面示波器抖動浴缸圖幾乎完全等效。[page]
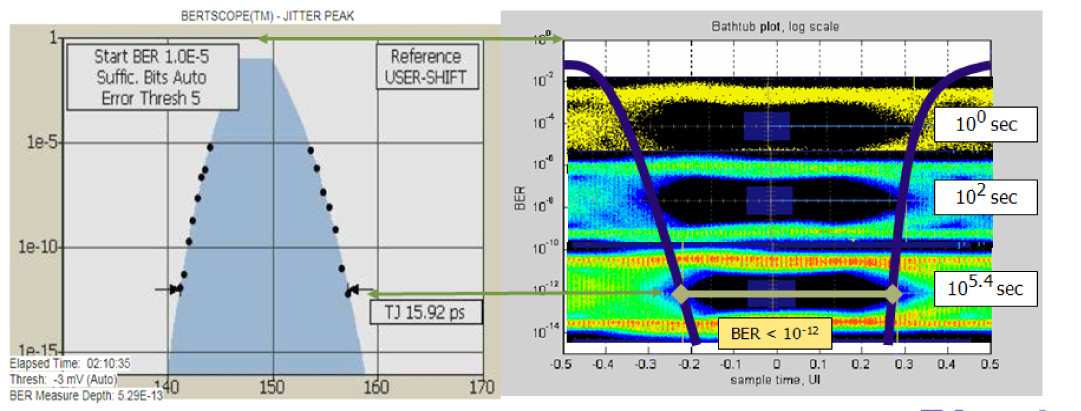
圖2 左面BERT 抖動峰值與右面示波器抖動浴缸之間的BER性能等效圖
鑒于結(jié)果緊密對準,示波器成為BERT非常實用的補充,因為使用BERT測量直到BER=10-12的TJ會需要幾個小時的時間,結(jié)果并不能揭示哪類問題導致抖動。示波器可以以智能方式測量少量數(shù)據(jù),然后把抖動劃分成各種抖動成分,其一般采用圖3所示的公認的抖動模型。通過做出假設,示波器可以進行TJ@BER計算,真實反映使用BERT獲得的結(jié)果,而所用時間只是BERT的幾分之一,也就是說,如果所有假設都正確的話,所有復雜系統(tǒng)模型都做出假設和簡化,因此模型和實際系統(tǒng)行為之間永遠不會完全擬合。正如本文后面討論的那樣,目前,特別麻煩的一個問題是串擾。
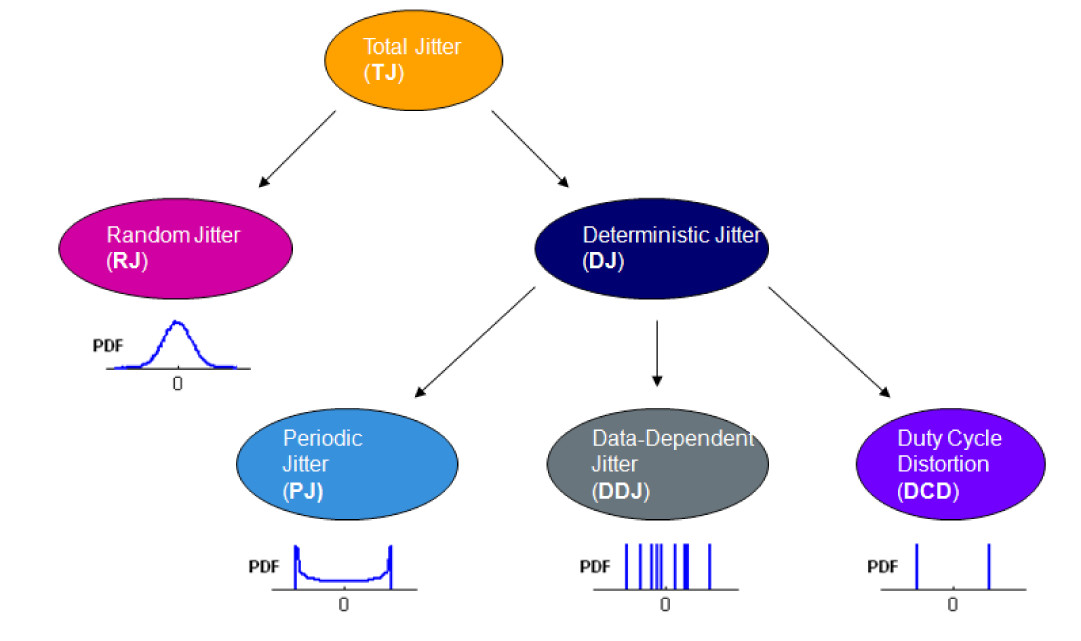
圖3 業(yè)內(nèi)抖動模型:2001-2010
串擾問題為實現(xiàn)性能目標,大多數(shù)串行系統(tǒng)采用多條通路。隨著頻率和數(shù)據(jù)速率提高到10 Gb/s以上,少量的串擾就會吃光抖動預算,產(chǎn)生定時問題。
在一個信號受到相鄰信號影響時,會發(fā)生串擾。在數(shù)據(jù)速率很高時,信號傳播方式更像是導波,而不是簡單的DC電流。波由傳導軌跡引導,但通過介電介質(zhì)輻射,一般是FR4.當存在一個以上的信號時,電路板上的每條傳導軌跡在其它每條軌跡上帶有假信號。公認的術語是侵入信號會在被侵入信號上導致串擾。在引導被侵入信號的導體撿拾到侵入信號時,就會發(fā)生串擾。電路布線中不可避免的不連續(xù)點(如連接器和通路)是關鍵點,在生成串擾時,它們的行為方式類似于天線。
實時采樣示波器和等效時間采樣示波器采用基于頻譜的抖動分析技術,隔離各種抖動成分。在實時采樣設備上,如果頻率成分沒有假信號,那么抖動和電壓噪聲頻譜有副諧波峰值,它們會被涂抹到電路板諧振形狀中,而不是表現(xiàn)為銳線。在采樣不足的設備上,如頻譜帶有假信號的等效時間采樣示波器,串擾表現(xiàn)為連續(xù)的噪聲。
在實時采樣示波器和等效時間采樣示波器中,這些基于頻譜的抖動分析技術都通過對連續(xù)抖動頻譜求積分來測量隨機抖動(RJ),由于串擾定時效應而夸大RJ.這會導致RJ提高,高估TJ.圖4顯示了示波器測量的抖動,在本例中,示波器測量的DUT擁有大量的串擾。
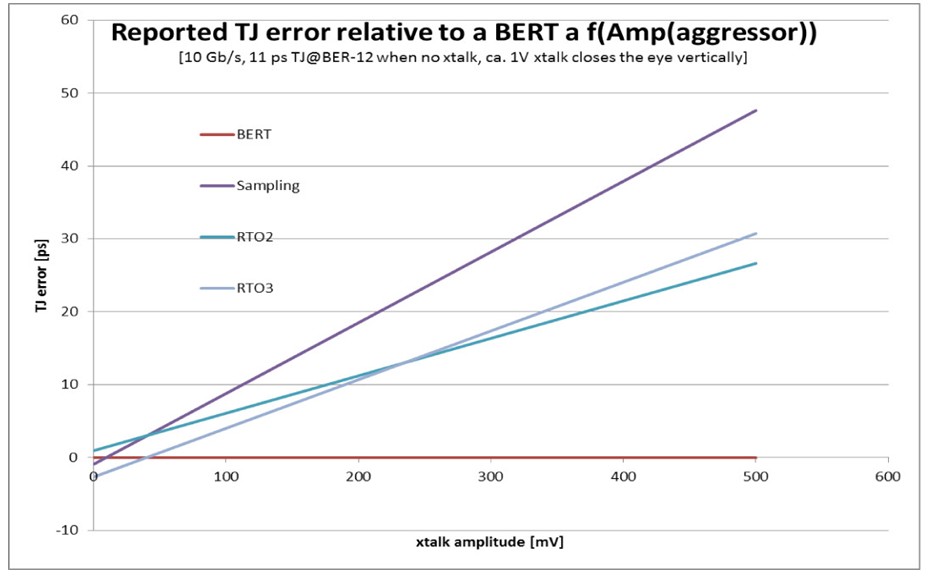
圖4 與BERT相比,示波器中的TJ誤差。(注: RTO = 實時示波器,采樣 = 等效時間示波器)
[page]
串擾在示波器中表現(xiàn)為有界不相關抖動或BUJ,因為它采用有界分布。數(shù)據(jù)碼型的復雜性會使分布的有界特點變得模糊。1和0似乎隨機的分布會導致在每個侵入信號跳變上傳送不同數(shù)量的電壓噪聲。
對串擾引起的BUJ的靈敏度在不同測量系統(tǒng)之間而不同。示波器在測量或推斷抖動時,會悲觀地把BUJ或NP-BUJ捆綁到RJ中,然后還會高報TJ.抖動結(jié)果(RJ,TJ)主要取決于侵入信號碼型復雜性,PRBS31最差,而PRB7一般不會導致大的誤差。在實時示波器中,RJ和TJ結(jié)果還取決于記錄長度,記錄長度越長,提供的樣點越多,抖動分離能力越好。這一問題的具體機制還與實現(xiàn)方案有關。
BUJ測量解決方案目前,在懷疑存在串擾時,有許多方法進行抖動分析,但沒有一種方法能夠像示波器為DDJ和PJ提供的結(jié)果那樣,提供單鍵測量結(jié)果。一條線索是抖動分析儀器報導的RJ測量結(jié)果是不是異常大。熱效應、也是RJ的最終成因,很少會超過3 ps RMS.如果報告的RJ大于3 ps,那么可能是串擾導致了問題。
識別串擾的其它技巧要求更多地控制侵入信號信道。例如,如果有可能關閉懷疑的侵入信號,那么可以比較侵入信號信道上有信號和沒有信號時的RJ測量數(shù)據(jù)。如果有侵入信號的RJ大于沒有侵入信號的RJ,那么串擾就是問題。解決方案是在Dual-Dirac模型中使用侵入信道關閉時測量的RJ及侵入信道打開時測量的雙Dirac DJ,來估算相關BER下的總抖動。這種方法的問題在于,它要求控制侵入信號,而并非一直可能實現(xiàn)。另一個問題是它在非線性系統(tǒng)中是無效的(大多數(shù)發(fā)射機是非線性系統(tǒng)),其對誤差持樂觀態(tài)度,因為部分串擾是無界的。
更加先進的方法是實現(xiàn)識別BUJ的抖動分析算法,這涉及在分隔DDJ和PJ之后在抖動分析中增加一個額外步驟,把NP-BUJ與RJ分開,如圖5所示。一個關鍵優(yōu)勢是這適用于每個場景,因為它不需要控制侵入信號,非線性TX不會帶來問題。此外,無界串擾成分將正確識別為無界。這種方法的缺點是結(jié)果仍有一些悲觀。
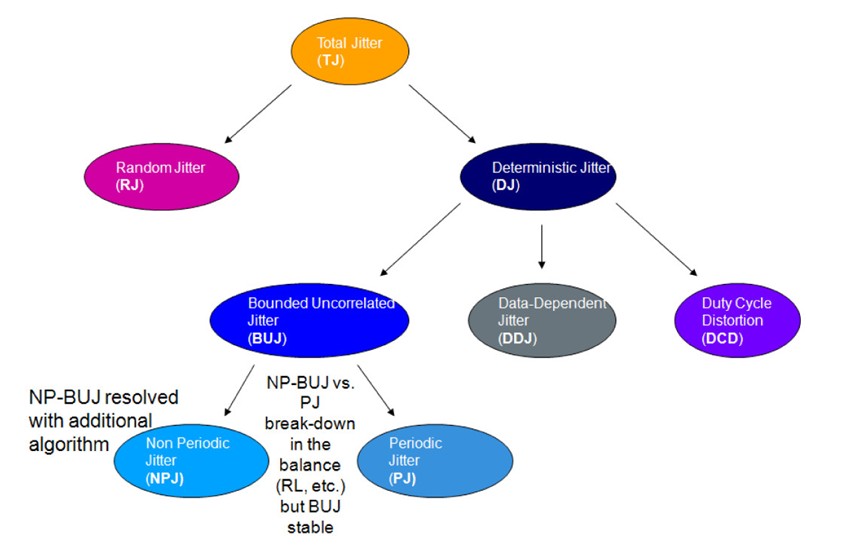
圖5 識別BUJ的抖動分析及得到的抖動分解地圖
為測試抖動分析算法把BUJ與其它隨機抖動來源準確分開的能力,我們重復圖4所示的測試,但增加了等效時間采樣示波器采用識別BUJ的抖動分析算法提供的結(jié)果。圖6中虛線表示的結(jié)果與BERT相比仍有些悲觀。實時示波器得到的結(jié)果還要更悲觀一些。也就是說,報告的TJ誤差精度大幅度改善,即使在懷疑的串擾可能會導致抖動和噪聲相關誤差時,仍有可能相信示波器的TJ測量。
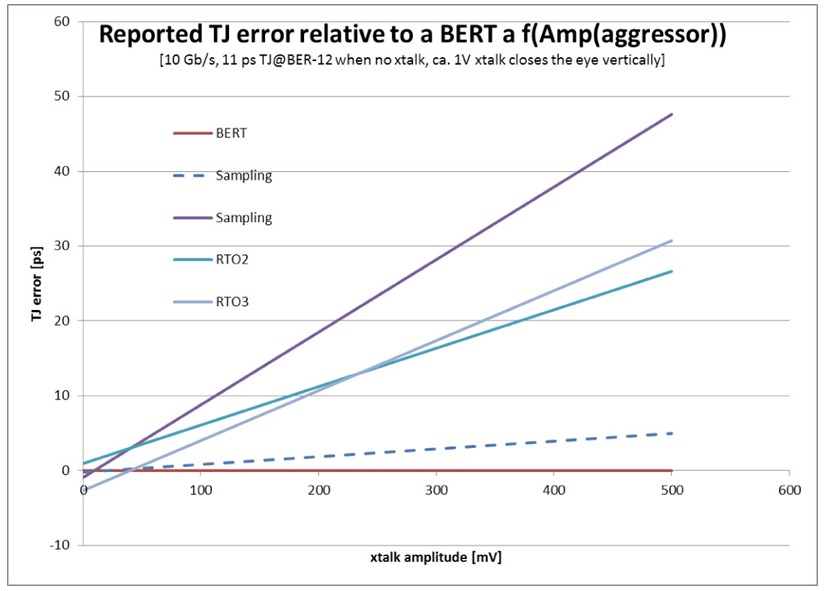
圖6 識別BUJ的抖動分析(虛線)算法顯示具有大量串擾的DUT上的精度明顯改善
小結(jié)隨著數(shù)據(jù)速率不斷提高,抖動已經(jīng)占到信令間隔中非常大的比重,設計人員全面了解設計中抖動類型和抖動來源越來越重要。由于大多數(shù)高速串行設計現(xiàn)在涉及多條通路,串擾幾乎是不可避免的結(jié)果,在抖動預算中必須考慮串擾。
但到目前為止,使用抖動分離技術一直很難測量串擾引起的抖動或有界不相關抖動的影響。由于抖動算法沒有考慮BUJ,因此BUJ一直與RJ歸并在一起,與BER測試儀獲得的結(jié)果相比,得到的是悲觀的總抖動結(jié)果。
正是認識到這種日益增長的問題,特別是對10 Gb/s以上的數(shù)據(jù)速率,抖動模型正在擴展到包括BUJ,并增加識別BUJ的算法。在涉及大量串擾的測試中,實踐證明,新模型可以在實時示波器和等效時間采樣示波器上有效提供TJ結(jié)果,并與BERT得到的結(jié)果一致。它還可以更加全面地分析設計中的抖動問題,包括串擾引起的抖動。

