
【導讀】定位是無線傳感器網絡中的一個重要的研究方向,定位算法的優劣直接影響著無線傳感器網絡在實際應用中是否可行。測量的數據不同以及使用的坐標計算方法的不同導致了各種不同的定位算法的產生。
質心定位算法是通過計算發送信息的錨節點所組成的多邊形的質心做為未知節點的坐標位置的一種算法。質心算法基于網絡連通性對未知節點進行定位,無需錨節點與未知節點進行協同操作,是一種非常簡單而且易于實現的定位算法,對于那些對定位精度要求不高的應用,質心算法是一個很好的定位方法。
DV-Hop算法的基本思想是先獲得未知節點與錨節點的跳數,然后計算網絡平均每跳的距離,再通過跳數與平均每跳的距離的乘積得到未知節點與錨節點的距離,最后,通過未知節點與至少3個錨節點之間的距離得到未知節點的位置坐標。DV-Hop定位算法是一種無需測距技術的、完全基于節點密度的、適用于密集部署的各向同性網絡的定位算法。
MDS-MAP定位算法的基本思想是先從全局角度生成網絡拓撲連通圖,當節點有測距能力時,用測距結果作為每條邊的值,否則,用所有邊賦值為1,表示僅有連通性信息,生成節點間距矩陣。然后用多維標度技術MDS(MultidimensionalScaling)生成網絡的相對坐標系統,最后,使用不在同一直線的n+1個錨節點信息把n維的相對坐標系統轉化為絕對坐標系統。
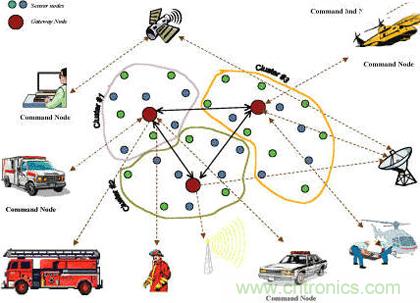
分簇算法把網絡中的傳感器節點組織成簇的形式,只在一個簇范圍內傳輸信息,不需要把控制消息傳遍整個網絡,可以有效地減少網絡的能量消耗。
簇成員的功能比較簡單,不需要維護復雜的路由信息,具有很好的可擴充性。
簇頭節點由簇頭選舉算法選舉產生,能根據網絡拓撲的變化動態分簇,具有很強的抗毀性和魯棒性。但是分簇算法中的簇頭選擇算法復雜度較高,而且簇頭節點還可能會成為網絡的瓶頸,從而影響網絡的能量消耗和定位效率。

改進的無線傳感器網絡節點定位算法
分簇算法的定位精度較高,但是其計算量也較大,用RSSI測距方法定位卻不夠精確。首先,把無線傳感器網絡劃分成多個區域,然后在每個區域內使用RSSI測距方法,通過多個錨節點計算未知節點的位置,最后,計算多個結果求出平均值最為最后的定位結果。
網絡區域的劃分是按照錨節點的距離為依據的,先計算網絡中所有錨節點之間的距離,選擇最近的幾個錨節點作為一個網絡區域,在該區域內的未知節點就用這些錨節點來定位。用RSSI測距方法測量未知節點與范圍內的錨節點的距離,用極大似然估計法計算未知節點的位置,并存儲于該節點中。最后,計算存儲在未知節點中的多個坐標數據的平均值,把平均坐標值作為節點的最終坐標。
對于網絡邊界的未知普通節點,它們周圍的錨節點數量較少,不適于上面的方法。可以通過它們周圍已經定位的普通節點來定位網絡邊界節點,把這些已經知道位置的普通節點看成上面方法中的錨節點,使用上面的步驟完成定位。
算法的具體步驟:
(1)計算網絡中錨節點之間的距離,并存儲離它較近的幾個錨節點的信息。
(2)以幾個錨節點為邊界劃分定位區域,錨節點的個數決定越多定位精度越高。
(3)在每個區域內,使用RSSI方法測量未知節點與幾個錨節點的距離。
(4)通過極大似然估計法計算未知節點的位置坐標,并把數據保存在未知節點中。
(5)對要定位的未知節點重復(3)(4)步驟。
(6)對網絡中每個區域中要定位的節點同時進行(3)(4)(5)步驟。
(7)網絡中每個未知節點對本身存儲的多個坐標計算平均值,把平均坐標值更新為該節點的最新坐標值。
(8)處理網絡的邊界未知節點。

